非视距信号路径返回的栅格迭代扫描定位算法
杜广周
(郑州轻工业大学,河南 郑州 451450)
无线传感器网络(wireless sensor network, WSN)是由大量传感器节点组成的自组织网络,在工业生产和社会生活中得到越来越广泛的应用[1]。在WSN中,定位技术是核心技术之一。常见的WSN定位技术有到达时间(TOA)、到达角(AOA)、到达时差(TDOA)、接收信号强度(RSS)等来估计节点的位置[2-3],以上算法定位精度较好,但对于硬件的要求相对较高[4-5]。因此,对于硬件条件较低的算法得到广泛研究,较为典型的算法为DV-Hop、Amorphous、Bounding-Box、Grid-Scan以及相关的衍生算法[6-10]。对于Grid-Scan算法,近年来已有一些研究。文献[11]通过研究Grid-Scan算法与极大似然法的定位特点,并将二者与虚拟锚节点策略融合,提高了算法的定位精度。文献[12]通过两次网格扫描缩小定位区域,再结合锚节点递减扫描进一步降低定位误差。文献[13]在文献[12]的二次栅格扫描基础上结合质心迭代算法提高定位精度。文献[14]在高斯白噪声的环境下,采用近似角匹配算法和迭代扫描算法相互作用,一定程度上抑制了定位误差。
在WSN定位中,信号传输方式可分为两种,一种是视距(LOS)传输,即信号可以从一个节点直线传输到另一个节点;
另一种是非视距(NLOS)传输,由于障碍物的阻碍,信号只能通过反射或折射在节点之间传输[15]。实际上,两种传输方式均存在高斯白噪声。文献[11-13]在理想通信信号传播模型下对Grid-Scan算法进行改进。文献[14]在视距环境下提升定位精度。
文中针对Grid-Scan算法在非视距环境下提高定位精度展开相关研究。在非视距环境下提出通信信号的路径返回可以有效校正邻居锚节点,并推算接近理想的信号强度。在路径返回算法的基础上,进一步提出栅格的迭代扫描算法提高定位精度。
1.1 传播模型
在无线传感器网络中,通信信号的衰减模型分为理想模型和不规则模型。在理想的信号传播模型中,信号传播不受噪声影响,理想模型可表示为[14]
PL(d0)-参考距离为d0时的路径损耗功率,一般d0=1 m;
η-路径损耗指数;
d-发射信号节点与接收信号节点之间的距离。
在实际环境下,信号的衰减受到环境噪声的影响。通过在理想通信模型中加入非视距环境下的信号强度衰减量和加高斯随机变量,可近似建立非视距通信信号传播模型,则
其中,δ是非视距环境下的信号强度衰减量与高斯随机变量之和。
1.2 Grid-Scan算法原理
Grid-Scan算法是采用规定的通信半径对网格化定位区域内的栅格进行扫赋值,以最大赋值栅格的质心作为位置估计[11]。通信圆产生估计矩形的四边分别与X轴和Y轴平行,得到估计矩形的四边可分别为max(xi-r), min(xi-r), max(yi-r), min(yi-r)。其中,r为邻居锚节点的通信半径,i为表示邻居锚节点下标,(xi,yi)为锚节点的坐标。在估计矩形覆盖的定位区域内,得到栅格的集合G,如图1所示,则[14]
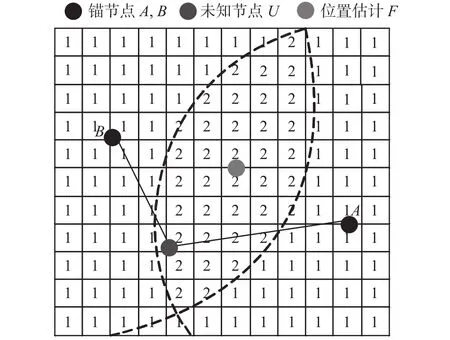
图1 Grid-Scan算法原理
式中:l——栅格边长;
q——栅格标号。
最大赋值的栅格为Vq,栅格质心Cq坐标为 (xCq,yCq),拥有最大赋值的栅格总数为n,最大赋值的栅格质心坐标的平均值作为位置估计(x,y)。
由于实际的环境噪声会影响定位精度,文中提出信号路径返回算法减小视距和非视距噪声的影响。结合信号路径返回算法,进一步提出栅格迭代定位算法提高定位精度。
由于受到非视距环境下的信号强度衰减量的影响,未知节点接收到的锚节点的信号强度难以达到最大传输。非视距环境使得信号强度存在衰减,未知节点可能无法采集邻居锚节点的通信信号。如图2所示,非视距锚节点A通过多径方式传播信号,由于多径传播对信号强度的衰减,未知节点接收到较大衰减的信号,甚至无法接收锚节点信号。定位前需要增强未知节点的信号发射功率,在规定的通信半径内,接收到未知节点的非视距锚节点通过不断增强发射信号来响应未知节点,从而使得未知节点与非视距锚节点建立通信关系。此时,非邻居锚节点可能被误判为邻居锚节点,而非邻居锚节点的介入会影响定位性能。文中采用信号强度的路径返回算法来消除视距和非视距的噪声影响,并去除非邻居锚节点。
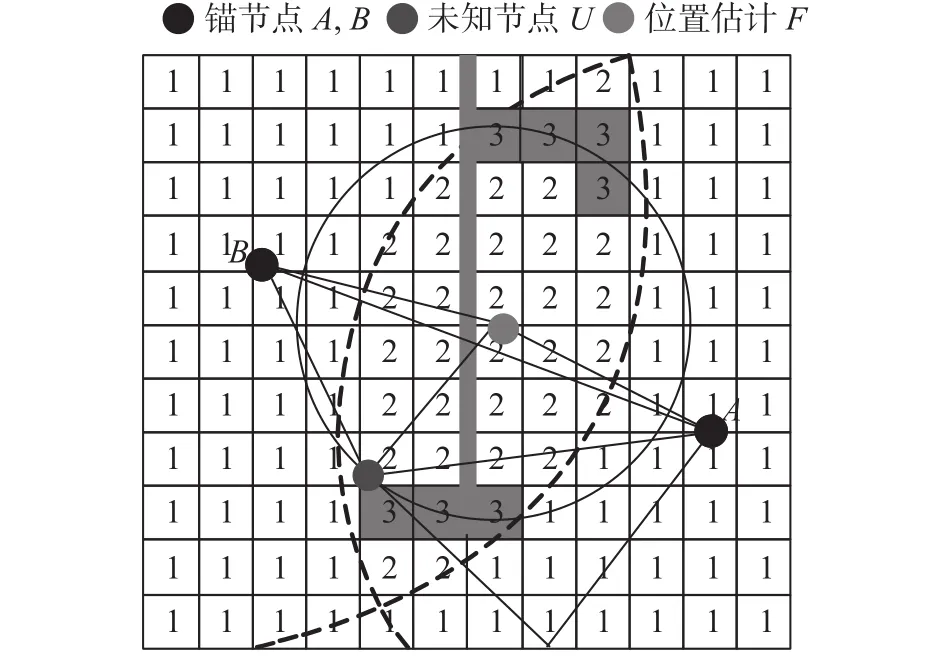
图2 非视距定位
如图2所示,当非视距锚节点不断增强信号强度时,将传播信号的路径视为传播最强信号强度的路径,则未知节点接收到第i个锚节点的最强信号强度可表示为
当锚节点向未知节点广播信息时,广播信号携带锚节点坐标和信号强度,未知节点通过标记信号强度和坐标信息对锚节点进行区分。由于非视距环境对信号强度的影响,当未知节点以接收到锚节点的信号强度为信号发射强度时,锚节点可能接收不到路径返回信号,未知节点需要再次增强信号强度以保持与锚节点的通信。因此,对发射的信号强度设置增强系数ωi保证非视距环境下信号强度的采集,则
同理,锚节点对接收到未知节点的信号强度设置增强系数,使得未知节点可以接收到锚节点的信号强度,则
未知节点通过P1(xi,yi),P2(xi,yi),P1(xi,yi)和 ωi计算接收到第i个锚节点的信号强度,即
当P0(xi,yi)满足设定的通信半径要求,判定第i个锚节点为邻居锚节点。节点间的信号增强系数ωi以数字信息的方式相互传输,当锚节点发送信号时,将上一次接收未知节点的增强系数传输给未知节点,从而使得未知节点估计出P0(xi,yi)的值。
信号路径返回对于视距锚节点同样适用,从而减小视距噪声对信号强度的影响。因此,信号路径返回可优化整体WSN网络邻居节点的关系,并计算接近理想通信信号传播模型的信号强度。
通过信号路径返回优化节点的邻居关系,采用原始的Grid-Scan算法得到相对缩小的定位区域,并得到估计位置点F。如图2所示,通过优化锚节点A,B与未知节点U的信号强度,由式(1)将信号强度转化为距离,得到四边形AUBF,则由四边形对角线得到三角形的内角为
假设四边形AUBF为凸四边形,则内角关系为其中,α1和β2可直接由式(11)和式(12)计算得到,则对式(9)和式(10)进行变换可得
当最大赋值的栅格Vq满足|CqF-UF|≤l/2时,将增加一次赋值Vq。如图2所示,阴影部分为新的最大赋值栅格。将初始位置估计点F替换为栅格质心Cq坐标为 (xCq,yCq),采用式 (9)~式 (23)的算法得到CqU,则 min{CqU}所对应的栅格质心Cq(xCq,yCq)为最终的位置估计。
在100 m×100 m的监测区域内随机产生k次节点网络,设置路径损耗系数η=4,k=100。控制节点总数,锚节点数,通信半径,在Matlab 2014a上对算法的定位性能进行仿真,节点网络中的未知节点的平均定位误差[14]为:
非视距环境下对算法的节点关系的校正性能和定位精度测试。设网络中节点的通信半径设置为r=50 m。如图3所示,以C型网络模型仿真非视距廊道环境,随机部署节点,*表示锚节点,○表示未知节点。将Grid-Scan算法记为GS算法,将采用路径返回的Grid-Scan算法记为TGS算法,将采用路径返回的栅格迭代算法记为TGSI算法。

图3 网络部署
设置栅格边长l=0.2r,节点总数从50个增加至150个,锚节点数为节点总数的0.4倍,如图4(a)所示,算法的定位误差均呈下降趋势,误差平均值为 0.46,TGS算法较 GS算法误差降低约 0.09,TGSI算法较GS算法误差降低约0.19。设置节点总数为100个,栅格边长l=0.2r,锚节点数由20个增至60个,如图4(b)所示,算法的定位误差随着锚节点增大逐渐下降,误差平均值为0.46,TGS算法较GS算法误差降低约0.10,TGSI算法较GS算法误差降低约0.18。设置节点总数为100个,锚节点数为40个,如图4(c)所示,改变定位区域内栅格边长对GS算法和TGS算法定位误差没有明显影响。由于栅格迭代扫描算法,栅格边长较小时,TGSI算法定位精度相对较高,TGS算法较GS算法误差降低约0.09,TGSI算法较GS算法误差降低约0.26。

图4 定位误差
由图4的定位误差对比可知,在通信信号路径返回算法基础上采用Grid-Scan算法较非视距环境下直接采用Grid-Scan算法的定位精度有一定程度的提高。因此,路径返回算法提高了非视距环境下Grid-Scan算法的定位性能。在路径返回算法基础上采用Grid-Scan算法和栅格迭代扫描算法时,迭代扫描一定程度上降低了定位误差。相比于文献[11-14],文中的算法在非视距环境下优化了Grid-Scan算法的定位性能。
文献[12-13]中的算法是在理想通信信号传播模型下对栅格扫描算法进行改进,难以克服定位区域内视距和非视距噪声的影响时。分析文献[11]中的数据结果可知,该算法在视距噪声环境下的平均定位误差约为0.42。因此,该算法在存在噪声环境下的定位性能是大幅度降低的。文献[14]采用双迭代算法一定程度上提高了视距环境下的定位精度。数据分析采用原算法的定位性能为对比标准,使得文中算法和文献[14]算法的实验数据具有基本参考的可比性。如表1所示,在视距和非视距混合的环境下,文中算法在三种控制条件下较原算法的平均定位误差分别降低了0.19,0.18和0.26。在视距环境下,文献[14]中算法的在三种控制条件下较原算法的平均定位误差分别降低了0.19,0.18和0.18。文中算法在视距和非视距混合的环境下的定位精度优于文献[14]在单一视距环境下的定位精度。由于非视距环境比视距环境更加复杂,因此,文中的定位算法总体优于文献[14]的定位算法。

表1 算法平均定位误差
文中首先提出无线传感器网络的通信信号路径返回算法来抑制非视距环境下的噪声,在信号路径返回算法和Grid-Scan算法的基础上提出网格迭代扫描算法进一步提高定位精度。信号路径返回算法可以同时抵消视距和非视距环境下的噪声,从而判定正确的邻居锚节点。由于定位区域的网格化,为减少每个栅格迭代的计算量,通过Grid-Scan算法缩小定位区域,选取满足条件的栅格进行赋值迭代估计,得到接近真实位置的一个栅格质心,完成位置估计。在无线传感器网络的非视距定位技术中,文中提出的算法一定程度上提高了定位精度。
猜你喜欢视距信号强度栅格光学相干断层成像不同扫描信号强度对视盘RNFL厚度分析的影响中华眼视光学与视觉科学杂志(2022年8期)2022-08-17电子自旋共振波谱法检测60Co-γ射线辐照中药材中成药(2022年1期)2022-01-27基于邻域栅格筛选的点云边缘点提取方法*科技创新与应用(2021年31期)2021-11-09俄罗斯中国计算机报(2020年9期)2020-03-25室内定位信号强度—距离关系模型构建与分析现代测绘(2018年1期)2018-03-06一种基于非视距误差补偿的协同定位算法北京航空航天大学学报(2017年7期)2017-11-24安全视距应该成为道路安全管理的基础共识汽车与安全(2017年9期)2017-09-29浅谈道路设计中的停车视距与验证居业(2017年5期)2017-07-24WiFi信号强度空间分辨率的研究分析测绘通报(2016年9期)2016-12-15不同剖面形状的栅格壁对栅格翼气动特性的影响弹箭与制导学报(2015年1期)2015-03-11