基于激光雷达技术的路面平整度算法
朱立伟,冷志鹏,李宏伟
(浙江杉工智能科技有限公司,浙江 宁波 315000)
近年来,随着社会经济的不断发展,我国的公路交通网络也在不断完善。截至2020年底,全国公路总里程已达到519.8万公里,公路密度已达到每百平方公里54.15公里。在对路面进行运营养护时,必须先对路面状况进行客观、量化的评估。路面平整度是路面评价及路面运营养护中的一个重要指标,反映的是路面纵断面剖面曲线的平整性。不平整的路面会增大行车阻力,并使车辆产生附加的振动作用,影响行车的速度和安全、驾驶的平稳性和乘客的舒适度。同时,振动作用还会对路面施加冲击力,从而加快路面损坏,影响路面的使用寿命[1]。
路面平整度的设备检测方法主要有两大类:纵断面测定法和响应式检测法[2]。纵断面测定法直接测出路面纵断面剖面曲线,然后对测出的纵断面曲线进行数学分析得出平整度指标。常用设备包括三米直尺、平整度仪等。这类检测方法由于采样较少,很难客观评价路面整体的平整度,还存在受人为因素影响大、精度低、效率低等缺点[3,4]。响应式检测法通过测出车辆对路面纵断面变化的力学响应,对其进行数学分析得出平整度指标。这类方法检测速度快,但精度较低,难以满足高质量公路日趋增长的检测需求[5,6]。因此,对公路平整度检测设备和方法的研究愈发重要,各国相关行业的研究人员都致力于其中[7],公路网发达的国家已研制出能够直接获得可靠检测数据的检测仪器[8]。
激光雷达技术作为一种新型空间数据获取技术发展迅速,其测量精度和处理效率得到快速提升,被广泛应用于各种领域[9]。通过车载激光雷达采集路面深度信息作为数据源对路面进行平整度计算已具有技术可行性,通过这一技术可实现公路养护管理的智能化,能够有效降低成本[10]。
本算法主要由数据采集模块、数据处理模块、平整度计算分析模块和路面状况评估模块组成,算法框架如图1所示。

图1 算法框架
(1)设备安装与数据采集:主要设备包括GNSS、激光雷达、高清摄像头等。GNSS对监测位置进行定位,激光雷达采集深度信息用于计算路面平整度,高清摄像头采集路面图片为后续养护工作提供支持。
(2)数据处理:主要包括数据筛选及简化、滤波处理、倾角消除等步骤。在兼顾准确度和处理效率的前提下,对设备采集到的数据进行预处理,并保留有效的、调整过的深度数据以进行后续计算。
(3)平整度计算:主要包括平整度标准差σ、国际平整度指标IRI计算。参考连续式平整度仪的测量原理,处理深度信息后,获得路面高程信息,计算平整度标准差σ;
再根据路面实际状况的σ与IRI的经验关系,将平整度标准差σ换算为国际平整度指标IRI。
(4)路面状况评估:根据平整度计算结果对路面的状况进行评估。
数据采集设备的搭载工具为小轿车,主要采集设备包括GNSS、激光雷达、高清摄像头等。其中激光雷达是路面深度信息采集的核心设备,其测量原理是利用激光测距来获取物体表面的三维坐标信息,即向测量目标发射激光,通过接收激光接触物体后反射回来的信号获取激光雷达到目标的距离。
由于本算法对深度信息要求较高,同时综合考虑经济性与便捷性,最终选用了Intel Realsense L515激光雷达作为本算法的主要数据采集设备。Intel Realsense L515是一款革命性的固态LiDAR深度相机,它兼具深度信息采集和彩色图像拍摄功能,采用了专有的MEMS镜面扫描技术;
与其他飞行时间技术相比,激光功率和效率更高。相机实物如图2所示。

图2 Intel Realsense L515深度相机
激光雷达工作时,使其以垂直于路面的姿态扫描路面,可以获得拍摄处的RGB彩色图像和深度信息及其对应的深度图像。深度信息是采集设备到场景中各采集点的距离及采集点的平面坐标。深度图像是深度信息在图像上的具体表现,是以各采集点的深度值为像素值得到的图像[11]。理想情况下,深度图像的正中心为坐标原点,是摄像头到路面的垂直投影位置;
竖直方向为y轴,是车辆的行进方向(即路面平整度测量的方向),向上为正,向下为负;
水平方向为x轴,是路面横断面方向,向右为正,向左为负;
垂直图像方向为z轴,是摄像机俯拍路面方向,垂直路面向外为正。采集得到的RGB彩色图像和深度图像示例如图3所示。

图3 采集到的RGB彩色图像和深度图像
激光雷达能够采集得到丰富的三维点云数据,但点云数据的质量受采集设备性能、采集时设备的平稳程度、光照等因素的影响,因此激光雷达的工作质量直接影响采集到数据的准确度,影响路面平整度计算的精度。
3.1 数据筛选与简化
(1)计算区域选择
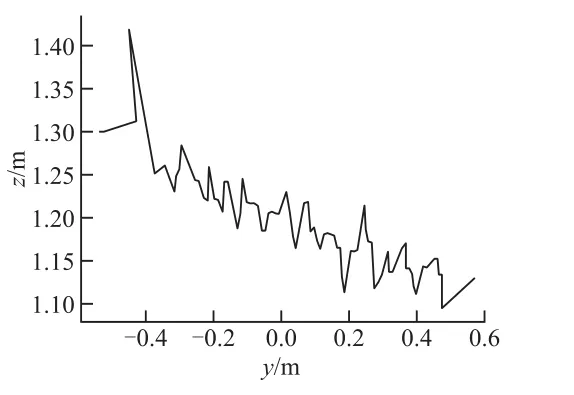
对路面平整度进行分析计算时,主要考察的是沿汽车行驶方向上的图像中心区域的路面平整度。因此可以简化计算,选择指定区域作为此张照片处路面平整度的计算区域,计算区域内的点云数据为计算路面平整度的参数对象。平整度计算区域以图像中心为标准,选择沿汽车行驶方向上与图像中心水平距离小于0.1 m,即-0.1 m 图4 平整度计算区域示意图 (2)三维点云数据降维 路面平整度的计算主要是为了量化沿道路方向上的路面起伏变化,因此可以将计算区域上的三维点云数据简化为深度z对应沿道路中心线方向y坐标变化的二维数据。由于对应计算区域上的同一个y值,可能存在一个深度点,也可能存在多个深度点,所以在转化为二维数据时,需要对存在多个深度点的y坐标位置进行等效处理,即将此处多个点的深度信息等效为多个点深度值的平均值。处理后即可得到计算区域内,路面深度z沿道路中心线方向坐标y的一一对应的变化曲线,如图5所示。 图5 路面深度变化曲线 由于激光雷达测量受到了高频噪声的影响,结果具有一定的不稳定性,所以采集到的数据有一定波动,需要对其进行滤波处理,以尽可能减小其对计算的影响。 本文采用加权滑动窗口滤波算法对深度数据进行预处理。本方法是对一个滑动窗口内的所有深度值进行重计算,用窗口内不同位置的深度值加权计算得到一个新的深度值,代替窗口中心点的深度值的一种线性平滑法。滑动窗口加权滤波算法原理简单、计算时间短,能在有效减小数据处理时深度值波动对结果的干扰的同时,较好地保留路面的起伏情况。 采用不同的滑动窗口大小对数据进行滑动窗口加权滤波处理时,若滑动窗口过小,则处理效果欠佳; 图6 不同滑动窗口大小处理后的深度变化曲线 由结果可知,在本文所使用的数据采集设备和拍摄环境下,选择大小为15的窗口进行滑动窗口加权滤波处理,效果较好,同时也能较好地保留路面起伏的细节变化。 倾角消除是指消除由于摄像头悬挂位置不垂直于地面或汽车行进过程中的颠簸等原因造成的倾角。 由于摄像头悬挂时位置不正、路面存在坡度、汽车行驶时上下颠簸等原因,雷达扫描路面时往往不是完全垂直于路面,而是存在一定的倾角。因此,得到的路面深度变化曲线往往不是水平的,需要预先对其进行矫正,以减小路面平整度计算时的难度,增加结果的准确度。 由于路面对象的特殊性,深度变化曲线总趋势一般为直线,因此可以通过深度变化曲线拟合一阶直线的方式来确定倾斜,再通过二维旋转公式,将倾斜的深度变化曲线矫正到水平,如图7所示。由图7可知,倾角消除效果较好,深度变化曲线主体走向基本为水平方向,深度变化曲线极值点大小基本在几厘米范围内波动。 图7 消除倾角后的深度变化曲线 可参考连续平整度仪的测量方法对激光雷达采集并处理后的数据进行平整度计算。连续式平整度仪是通过数据采集设备直接采集路面相对于动态基准的纵向高差数据,再进行计算分析,得到标准差σ(又称均方差)对路面平整度进行表征[12]。计算平整度标准差σ的具体步骤如下: (1)以激光雷达采集到的单张路面深度图像(长度一般为0.5~1 m)为对象,按前文的方法进行数据分析与处理,可以得到车辆行进方向上、图像中心附近位置处的点云y-z轴深度变化曲线。 (2)读取每个点的深度值z1,z2,z3, ...,zn,并计算所有点的平均深度zm。 (3)通过下式计算路面的平整度标准差σ。 经过统计计算,深度变化曲线极大值点最大为1.195 m,极小值点最小为1.780 m,平整度标准差σ约为3.5 mm。 已知平整度标准差σ,可以通过经验公式σ=a×IRI+b计算得到国际平整度指标IRI[13]。由路面实际状况确定的σ与IRI的经验关系如下: 经过计算,此处路面的国际平整度指标IRI为5.88。与3 m直尺法人工测量的结果相比,理论误差在10%以内。 本文提出了一种先进的路面平整度评价方法,通过激光雷达技术实现路面平整度快速分析计算,为路面养护提供了一种新思路,可大大降低传统检测方式在人员方面的投入,降低检测成本。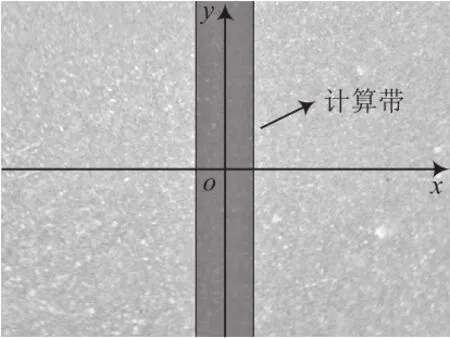
3.2 滤波处理
若滑动窗口过大,则曲线过于平缓,无法反映路面起伏的细节变化,路面平整度计算的误差较大。因此,在对深度变化曲线进行滑动窗口滤波处理时,根据特定的设备、拍摄距离等,选择合适的窗口大小尤为重要。加权计算时,计算点深度值的权重随着离窗口中心距离的增大而逐渐减小,以放大离窗口距离近的计算点的测得深度值对滤波结果的影响。现分别采用滑动窗口大小为2、权重系数为[1,1],滑动窗口大小为3、权重系数为[1,2,1],滑动窗口大小为5、权重系数为[1,2,3,2,1],滑动窗口大小为 10、权重系数为 [1,2,3,4,5,5,4,3,2,1],滑动窗口大小为15、权重系数为[1,2,3,4,5,6,7,8,7,6,5,4,3,2,1],滑动窗口大小为20、权重系数为[1,2,3,4,5,6,7,8,9,10,10,9,8,7,6,5,4,3,2,1]对深度变化曲线进行滑动窗口滤波处理,结果如图6所示。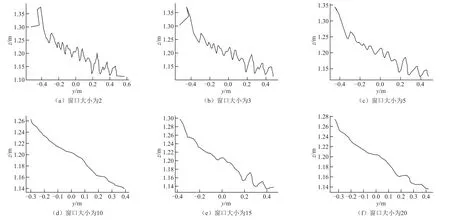
3.3 倾角消除

4.1 计算平整度标准差
4.2 计算IRI