超深层目标随钻测井引导的动态地震成像
王腾飞, 程玖兵*, 朱峰, 伍新明, 徐蔚亚, 耿建华
1 同济大学海洋地质国家重点实验室, 上海 200092 2 中国科学技术大学地球和空间科学学院, 合肥 230026 3 中国石油化工股份有限公司石油勘探开发研究院, 北京 100083
随着深层、超深层储层逐步成为我国油气勘探开发的重点目标之一,与之相应的深井钻探与开采成本也不断增加(何治亮等,2021).基于地震数据的构造成像与综合地质解释是优选钻探目标与确定钻井方案的重要依据.因此,提高地震成像精度对降低钻探风险与成本、提高储层钻遇成功率具有重要意义.
在上覆介质横向非均匀性很强的情况下,叠前深度偏移因其对复杂构造成像的有效性被广泛采用,但其精度很大程度上取决于深度域偏移速度模型的可靠性.迄今为止,基于共成像点道集的反射走时层析一直是配套叠前深度偏移的主流速度建模技术(Claerbout,1985; Stork,1992;
Woodward et al.,1998).然而,受观测孔径限制、速度-深度耦合以及地下介质复杂非均匀性甚至各向异性等因素的影响,层析反演多解性很强,即使建立的速度模型能使偏移图像聚焦、共成像点道集拉平,也常常会发现成像深度与钻井结果存在较大的闭合差(Adler et al., 2008; Woodward et al.,2008;
Osypov et al.,2013).随钻测井获得的声波时差、密度、孔隙压力以及钻井使用的泥浆比重等信息都能为速度模型修正提供重要信息.随钻地震则通过钻井过程中校验炮资料等信息及时更新速度模型与偏移成像结果,实现对钻井前方地层结构与钻探目标的重新评估和预测,为钻探靶点调整和轨迹优化提供实时决策依据(史鸿祥等,2016;
周小慧等,2016;
查树贵等,2018).
在钻井过程中采集校验炮数据主要有两类方法:一类是钻头随钻地震,即以钻头破岩时的振动作为震源,在地表布设检波器进行信号采集(Poletto et al., 2001;Naville et al., 2004).由于震源能量弱,且钻头性质、地层岩性以及钻进方向等因素都会对地面接收信号产生影响,如何提高信噪比是比较关键的问题(陆斌等,2009;
吴何珍等,2010;
Bakulin et al.,2020;
Poletto et al.,2020).另一类是随钻垂直地震剖面(VSP),采用海面气枪或地表可控震源等方式激发,在井下使用多分量地震检波器接收信号,并通过泥浆脉冲传输系统实时传回校验炮数据(Esmersoy et al.,2013).由于随钻VSP在钻进的间隙进行地震信号采集,大幅降低了施工成本并且可避免对钻井操作产生的风险,故已在国内外获得了广泛应用(Esmersoy et al.,2012;
Shi et al.,2014;
史鸿祥等,2016).
为了减少钻探平台的等待时间,获取校验炮之后的速度更新与重新偏移过程必须有极高的实时性,通常要求在24 h内完成.常规偏移速度建模与叠前深度成像处理周期较长,难以满足随钻地震对时效性的要求(Woodward et al.,2008).在当前实际应用中,如果偏移速度明显偏离校验炮数据处理结果,较为快速的调整策略通常是先对偏移速度重新标定,再对地面数据反射地震成像结果进行一维垂向拉伸以修正钻探目标的预测深度(杨学民和彭成斌,2018).然而,当上覆地层存在强横向变速时,速度误差会同时导致钻探目标在横向和垂向的偏离,仅用一维图像拉伸无法实现三维结构的准确归位,影响下一步钻探方案的合理调整.为此,某些国际知名的石油工程服务公司先后研发了所谓的地震导向钻井技术(SGD),通过采集到的校验炮数据修正三维速度模型并重新进行叠前深度偏移,以提高钻头前方地震成像精度(杨学民和彭成斌,2018).该技术已在我国塔里木地区深层碳酸盐岩溶洞型储层钻探中获得了成功应用(史鸿祥等,2016).上述公司只提供工程服务,未公开钻探过程中速度模型更新的具体方法技术.因此,在国内加大随钻测井、随钻地震技术与仪器研发的背景下,发展与之配套的速度模型与地震成像更新方法,有望推动我国深层、超深层油气资源高效勘探与经济开发的技术进步.
本文提出了一种随钻测井引导的地震成像方法,联合随钻测量的地层速度与预先的地震成像结果,实时修正井周三维速度模型,并且借助基准面延拓快速完成钻头前方局部一定范围的叠前深度偏移处理,为钻进方案优化提供更精确的地震图像.下面先介绍核心方法与技术流程,然后利用塔里木盆地跃进工区实际地震和测井数据,仿真随钻测井过程检验方法技术的有效性.
在地震解释中,三维地震成像数据的一致性波形属性,如波峰、波谷或振幅零点等同相点形成的层位面,通常用以指示具有相同地质年代的沉积地层.由于同时代的地层沉积环境类似,所经历的地质过程也基本一致,因此对应的岩石物性也很相近.利用这一特性,可以在相对地质年代信息约束下利用钻井速度对井周偏移速度模型更新.下面具体阐述其中两个关键步骤.
1.1 高分辨率三维地质年代体计算
相对地质年代体(RGT)的概念最早由Stark(2003)提出.如图1b所示,它由随空间坐标变化的地质年代时间构成.根据地质学原理,在没有剧烈倒转的区域,地层埋藏越深其地质年代越老,因此通常假设地质年代时间随深度单调递增.在此情况下,可以从三维地震成像数据体出发,通过相位展开(Stark,2003,2004;Wu and Zhong,2012)或者反射界面倾角预测(Fomel,2010;
Parks,2010)等方法估算RGT.计算方法详见附录A.当地震数据存在断层或不整合面等复杂结构时,相对地质年代体的求解往往会遇到较大挑战,需要通过各向异性的平滑算子和断层两侧点位控制等约束条件来提高求解精度与稳定性,更多细节可参考Wu和Hale(2015).最终,通过上述方法求解出三维空间中每个样点处的垂向时差,进而可以获取相对地质年代体.
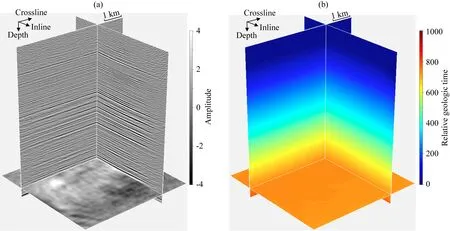
图1 三维地震成像数据体与相对地质年代体
1.2 井周速度快速更新
在钻探过程中,通常有两类方法获得井孔周围地层地震波传播速度.第一类方法可由随钻测井声波时差数据换算成声波速度,然后基于Backus平均估算地震波层速度信息.第二类则可以利用校验炮或随钻VSP初至走时信息快速估算地层波速.将由测井或随钻地震获得的井孔地震波速度v(x,z)与深度域偏移速度v0(x,z)相减,即可获得井孔处深度域偏移速度的更新量δv(x,z),进而在相对地质年代信息约束下对井周三维偏移速度模型进行更新.首先,以井轨迹为中心、半径为r的圆柱体内,将井孔速度更新量在相对地质年代一致的方向插值外推,并随着与井孔距离增加对更新量δv(x,y,z)进行高斯衰减,以保证更新后的偏移速度没有异常的垂向突变界面.然后,根据相对地质年代信息,利用三维垂向时差s(x,y,z)对δv(x,y,z)进行拉伸,使其与地震层位平行(图2).最后,将沿地层约束后的速度更新量施加到原有偏移速度体上,获得更新后的偏移速度模型.

图2 井周快速偏移速度更新示意图
2.1 地震炮记录的基准面延拓
在前一阶段随钻测井或随钻VSP引导下更新偏移速度模型后,需要快速更新地震成像以指导下一阶段的钻探.从地面开始的三维叠前深度偏移非常耗时,难以在钻井间歇时间窗口内完成.在波动方程基准面延拓(如Yang et al.,2009)的基础上实施井周局部三维叠前深度偏移处理是一种有效的解决方案.首先,以当前钻井深度为本阶段的基准面,基于已更新的偏移速度模型完成井周叠前深度偏移成像,同时把延拓到基准面的源端和检波器端波场数据保存下来,形成所谓的虚拟炮记录.然后,在下一个钻探阶段完成偏移速度模型更新之后,就直接用这些虚拟炮记录对井前一定范围的局部空间进行叠前深度偏移成像.叠前深度偏移与基准面延拓共享了源端和检波器端波场传播计算,每个钻探阶段的成像空间都不大,而且随着基准面变深,虚拟炮记录的规模也在不断缩小,这就给钻井引导的快速地震成像创造了非常有利的条件.
2.2 GPU加速的波动方程叠前深度偏移
在保证成像精度前提下尽量缩短叠前深度偏移计算时间是确保随钻地震成像技术成功应用的关键.这里采用单程波方程叠前深度偏移方法,使得偏移成像与基准面延拓完全共享源端和检波器端的波场延拓计算,并且克服射线类偏移方法在处理强非均匀介质中多波至和焦散问题时存在的不足.为了保证波场延拓的精度,采用优化系数傅里叶有限差分算法求解频率域的三维标量单程波方程,构建具有广角精度的上行波与下行波深度延拓算子(程玖兵等,2001;
Biondi,2002).基于上述波场延拓与成像的快速算法,在更新过程中输出钻头前方地震成像结果,同时保存延拓到当前基准面上的源端和检波端波场,作为下一阶段快速地震成像的输入数据.
为满足随钻地震成像对计算效率的要求,采用CPU/GPU异构并行计算平台对波场延拓与成像算法进行加速,以便在钻井间歇时间窗口内快速获得井周及钻头前方的高精度地震图像.上述过程中采用两级的并行模式:第一级基于MPI信息传递接口实现炮域粗粒度并行,第二级基于GPU进行线程级的细粒度并行,实现源端与检波器端波场延拓以及成像条件施加.在震源和检波点端的波场延拓过程中,沿x-y平面的二维傅里叶变换是主要的计算瓶颈.对此,采用CUDA平台内置的cuFFT数学库进行快速傅里叶变换实现算法加速,并根据cuFFT数学库的特点,搜索最优的变换长度(应符合2a×3b×5c×7d,a,b,c,d为自然数)对x-和y-方向的采样点进行镶边,提高计算效率.同时,针对过程中涉及的CPU与GPU之间的数据传输以及虚拟观测数据的磁盘读写等计算瓶颈,依据操作的执行顺序和数据的依赖关系,利用主机端与设备端任务异步执行以及流并行等机制,交替使用缓冲区,充分实现波场计算-传输-读写的重叠执行以缩短总体运行时间.
以井周三维偏移速度模型更新、波动方程基准面延拓以及GPU加速的单程波叠前深度偏移为核心,本文建立了一种随钻测井或随钻VSP驱动的地震成像技术流程(图3).首先,从目标工区叠前深度偏移处理获得的三维成像体估算高分辨率的相对地质年代体,为速度模型更新提供地层格架约束;
根据钻位坐标和钻探目标范围,基于三维射线追踪确定对深部预定钻探目标成像有贡献的炮检分布,据此从预处理后的三维叠前地震数据中筛选出相应的炮道集,连同叠前深度偏移处理获得的深度域层速度模型和估算的相对地质年代体作为整个流程的输入数据.然后,在一个阶段的钻探完成后,立即利用随钻测井或随钻VSP提供的地震波层速度信息,在相对地质年代信息约束下对井周一定范围内的偏移速度模型进行更新.接着,通过GPU加速及时更新井周和井前一定范围内的三维地震图像,并用延拓到当前钻井深度的源端和检波器端波场作为虚拟观测数据,当作下一个阶段输入的炮记录.在工程进度允许的情况下,可采用最小平方基准面延拓方法(Zhu and Cheng,2022),同时提高虚拟观测数据与井周地震成像的质量(如分辨率、信噪比和振幅保真度).最后,根据钻头前方最新的三维地震图像,重新评估钻探目标和优化钻进方案.这样经过数个阶段的迭代,直至达到钻探目标深度.由于钻井平台远离室内地震数据处理中心,上述流程中钻井驱动的速度模型与地震成像更新可采用便携式GPU工作站作为计算平台.

图3 随钻测井速度引导的动态地震成像技术流程
下面以塔里木盆地跃进工区为例,利用前期获得的测井速度资料以及地震叠前深度偏移结果,模拟两个阶段随钻测井驱动的地震成像更新过程,初步验证方法技术流程的有效性.由于缺少实际随钻测井或随钻VSP数据,这里选取工区内YJ-3井为模拟井位,将前期该井常规测井资料处理获得的声波速度数据分为1.5~4.2 km、4.2~7 km两段,代表两个不同钻井阶段获得的高分辨率层速度.下面对更新过程进行详细说明.
首先,在数据准备阶段,选取井周5.0 km×5.0 km范围的叠前地震数据(共334炮)、偏移速度模型以及深度域地震成像体,并基于成像体数据估算相对地质年代(图4).然后,进行随钻测井第一阶段的速度模型更新.将高分辨率的声波速度进行Backus平均,获得适合地震成像的纵波层速度(图5a蓝色实线),并在相对地质年代信息约束下更新井周(以井轨迹为中心、半径1.0 km范围内)偏移速度模型,如图6c—d所示.接着,在配备6张RTX-3080Ti高性能显卡的GPU工作站上,完成第一阶段的叠前深度偏移处理,更新井周与钻头前方三维地震图像.在上述深度偏移过程中,用延拓到钻头深度的源端和检波器端三维波场数据替换地面炮集数据,作为第二阶段的虚拟观测地震数据.由于浅部层速度整体上更新量不大,而且井周速度横向变化较小,这个阶段更新后深层地震图像改变不明显.因此假设按常规测井轨迹继续向深部钻进.

图4 井周5 km×5 km范围的三维地震成像数据(a)、偏移速度模型(b)和相对地质年代体(c)

图5 第一阶段1.5~4.2 km的速度更新

图6 第二阶段4.2~7 km的速度更新
当第二阶段钻井结束时,对4.2 km至7.0 km深度范围内井周偏移速度进行更新(如图6),并利用虚拟观测数据从4.2 km深度的基准面开始进行新一轮的局部叠前深度偏移处理.如图7所示,在完成第二阶段速度模型更新之后,井周地震成像得到了改善,深度5 km以下的反射界面成像更聚焦;
对比5.7 km附近的标志层位,钻前、钻后层位深度调整达到60 m左右.而且,在更新后的地震成像与测井声波阻抗曲线更加吻合(图8).上述两个阶段的三维叠前深度偏移处理分别耗时2.5 h和2.6 h.把配套的随钻测井或随钻VSP数据处理考虑在内,每个阶段在速度模型和地震成像更新都可在24 h之内完成.

图7 偏移速度更新前后成像结果以及奥陶系内部关键界面(T74)目标层位对比差异

图8 更新前后inline=2.5 km处的地震切片以及测井声波阻抗曲线对比
从实践的角度看,随钻测井数据实时处理在前文技术流程中起到非常关键的作用.在上覆地层横向速度变化不太强的情况下,本文基于随钻测井与相对地质年代信息的偏移速度更新是有效的.当上覆地层存在强烈的横向非均匀性时,有必要利用随钻VSP数据甚至地面三维地震数据或基准面上的虚拟观测数据,按照三维走时层析原理更新上覆地层的速度乃至各向异性和衰减参数,并采用适应上覆介质特性的叠前深度偏移算法更新成像结果.然而,简单沿用常规叠前深度偏移处理中基于共成像点道集的反射走时层析更新速度模型并不合适,因为剩余时差拾取工作较为繁琐,且共成像点道集生成与三维走时层析计算耗时巨大,这些都很难在钻探过程中短暂的间歇内完成.针对更复杂地质情况,提出基于随钻VSP或虚拟观测数据的偏移速度模型更新方法,是下一步急需开展的工作.
在随钻测井引导的地震成像技术流程中,与叠前深度偏移处理同步的基准面延拓为高效的局部地震成像创造了非常有利的条件.由于地表观测孔径限制、震源和检波器排布不规则以及上覆复杂地质体的影响,常规的基准面延拓方法可能无法保证虚拟观测的质量(Zhu et al.,1998;
Xue and Schuster,2008).最近受到关注的基于迭代反演的最小平方基准面延拓方法(Guo and Alkhalifah,2020;
Zhu and Cheng,2022)为提升虚拟观测数据品质提供了很好的思路.能否使其在随钻测井引导的地震成像技术流程中具有计算可行性,值得加以研究.
值得注意的是,本文随钻测井引导的动态地震成像并非绝对意义上的实时监测,而是在钻进过程中的关键节点(如更换套管等时间窗口)及时处理传回地面的声波测井数据,并按本文方法进行速度模型与地震成像的快速更新,再对钻探目标进行重新评估,从而引导钻头朝着更准确的位置钻进.
本文针对深层、超深层复杂油气藏高效勘探与经济开发面临的难题,提出了一种随钻测井驱动的快速地震成像方法.它基于钻井提供的声波速度资料,在相对地质年代约束下对地震波偏移速度模型进行更新,依托便携式高性能计算平台完成钻头前方一定范围内的叠前深度偏移处理,保证在钻井间歇时窗内能够实时更新钻头前方的三维地震图像,重新定位深部储层目标、及时调整钻井轨迹,有助于提高钻探成功率.塔里木盆地跃进工区围绕YJ-3井的模拟实验结果表明,井资料提供的地层速度在Backus平均之后,可以在地质学原理指导下有效修正井周偏移速度模型,从而改善重新偏移处理结果的井震闭合程度.今后拟将这项技术与随钻VSP技术有机融合,使之可以处理上覆介质地震波速度横向非均匀性非常强的复杂地质情况.
致谢感谢北京大学能源研究院金之钧院士和中国石油化工股份有限公司何治亮教授对本项研究工作的指导.
附录A 基于结构张量的相对地质年代体计算
本文采用基于结构张量的方法来计算RGT(Wu and Hale,2015).在RGT中,某一固定的地质年代时间τ(x,y,z)=τ0所形成的平面与该空间位置处的地震层位应保持一致,因此RGT的梯度向量应与地震层位的法线方向平行,可以表示为:
(A1)

τ(x,y,z)=t+s(x,y,z),
(A2)

(A3)
其中p=-nx/nz,q=-ny/nz分别为地震反射同相轴在x和y方向的斜率,w为与p,q可靠性有关的权重因子.对于空间任意一点,(A3)式中w,p,q均为已知量,三个方向的空间导数可以通过有限差分近似获得,因此公式(A3)左端可看作由w,p,q以及差分系数共同决定的矩阵运算.
如果三维成像数据体包含N个采样点,则按(A3)式构成3N个线性方程组,写成矩阵形式满足:
WGs≈Wv,
(A4)
其中W为权重因子构成的大小为3N×3N的对角阵,s为包含待求的相对地质年代,为N×1的向量,G为包含p,q以及差分系数的稀疏矩阵,大小为3N×N,v由地层斜率和零向量构成,大小为3N×1.通过最小二乘方法求解该线性方程组,可获得各成像点处的s(x,y,z).最终通过公式(A2)计算获得三维相对地质年代体.
猜你喜欢 基准面测井钻井 本期广告索引测井技术(2022年3期)2022-11-25自升式钻井平台Aker操作系统应用探讨海洋石油(2021年3期)2021-11-05低信噪比数据静校正技术综合应用研究中国化工贸易·中旬刊(2020年5期)2020-11-06翻车机本体转子窜动原因分析及解决方法价值工程(2019年30期)2019-12-02最高、最低点重叠度计算的分析研究科技创新与应用(2019年24期)2019-10-24扫描“蓝鲸”——观察海上钻井平台小哥白尼(趣味科学)(2019年5期)2019-08-27全断面岩巷掘进机刀盘的加工科技创新导报(2019年6期)2019-06-11基于测井响应评价煤岩结构特征中国煤层气(2015年4期)2015-08-22随钻电阻率测井的固定探测深度合成方法西南石油大学学报(自然科学版)(2015年4期)2015-08-20裂缝性致密储层钻井完井液漏失损害带模拟西南石油大学学报(自然科学版)(2015年5期)2015-04-16