露天矿卡车无人驾驶测试基地建设构想
王利明
(中煤西安设计工程有限责任公司,陕西 西安 710054)
近年来,我国矿山智能化研究与建设工作进入了快速发展阶段[1-2]。其中矿山运输作为露天煤矿的核心生产环节,智能化升级一直都受到煤矿企业及行业的重点关注,目前国内已出现部分矿山企业进行矿山无人驾驶系统的研究测试和小范围应用。为使露天矿山卡车无人驾驶技术尽快进入大范围落地应用阶段,需要对设备、系统、工艺、管理等方面进行工业试验。而目前在生产矿山进行矿卡无人驾驶技术全环节全流程的研究测试存在难度,对矿山的正常生产会产生较大影响,因此,提出建设露天矿山卡车无人驾驶测试基地的构想,通过在测试场地部署矿山无人驾驶技术的相关测试设施,针对性地设计露天矿山各环节的真实作业场景,对矿卡无人驾驶系统进行深度研究与测试,研究无人化技术在露天矿山的适用性、可靠性和先进性,为后续矿山无人化技术在各大露天矿山的应用提供依据。
露天矿山卡车无人驾驶技术在国外发展较早,其中较为知名的无人矿卡设备生产公司有:Caterpillar(卡特彼勒)、Komatsu(小松)、Hitachi(日立)等。而一些国家的露天矿山已经成功应用了无人驾驶矿卡,如智利国有铜业公司(Codelco)旗下最大的分公司北方铜矿公司应用了小松公司的自动运输系统;
加拿大森科尔能源公司计划在其下属North Steep-bank 矿山部署超过150 辆无人驾驶卡车;
澳大利亚Fortescue Metals Group(FMG)与卡特彼勒(CAT)公司合作在所罗门铁矿区投入使用54 台无人驾驶矿,使矿区的运行效率提高了20%;
澳大利亚西部皮尔巴拉铁矿区目前拥有全球最大的无人驾驶卡车车队,目前超过130 台,运输量超10 亿t 矿石。
在国内测试与应用方面,比较有代表性的有2018 年包钢集团、踏歌智行、北方股份、北京航空航天大学、中国移动、华为合作签约,共同推进世界最大的稀土露天矿山白云鄂博矿无人驾驶项目,实施“5G 网络条件下无人驾驶及操作的智慧矿山技术的开发及应用”;
江铜集团、中国移动、华为、航天重工和山推股份在城门山铜矿联合打造的国内首个有色矿山车联网系统,矿车具有无人行驶、智能避障等功能[3-4];
中煤平朔集团公司东露天煤矿、国家能源集团黑岱沟露天煤矿、西湾露天煤矿[5]等国内大型露天煤矿在生产矿山进行的小范围矿卡无人驾驶应用示范项目。
根据目前国内的测试与应用情况,主要突显出2 大问题:①安全:受技术限制,目前矿山无人驾驶车辆都配备有辅助驾驶人员和安全员,减人目标实现不了,极大地提高了无人驾驶运输的作业成本;
②效率:因作业环境较为复杂,目前矿山主要生产运输设备无人驾驶的运行效率较有人驾驶会有所降低,矿山大范围使用无人驾驶会造成产能目标无法实现、生产成本大幅提升等问题。
露天矿山卡车无人驾驶测试基地的建设目标为尽最大可能还原露天矿的实际作业条件,并尽可能在测试基地中模拟露天矿所有可能出现的场景,以达到测试系统适用性和可靠性的目的。以平朔矿区安太堡露天煤矿转向遗留采坑作为基地建设的研究对象,对如何构建专业化矿卡无人驾驶测试基地进行研究。
2.1 基础建设条件
测试基地的核心目标是对露天矿山卡车无人驾驶技术进行全环节全流程的测试研究,因此要建设高质量的测试基地,应尽量还原露天矿的实际作业条件,基础建设条件主要如下:①具备露天矿山的基本组成要素:如剥采工作面、道路、排土场地等;
②场地应具备良好的外部建设条件:如电源、进场道路等;
③场地应能最大程度的还原露天矿山的真实环境。
安太堡露天煤矿转向遗留采坑位于安太堡矿内排土场西侧,矿区生态公园以东。在安太堡矿开采该处位置向东完成转向后,由于内排跟进问题遗留下该处矿坑,因此完全满足场地选址的几个关键条件,且该处位置目前已经废弃,不与现有生产露天矿发生交叉,具备非常好的基地建设条件。矿坑北帮与西帮为剥离遗留终帮,南帮和东帮为排土遗留终帮。矿坑坑底标高为1 235 m 水平,矿坑四周地表最大标高约1 480 m 水平,矿坑的最大深度为245 m。
2.2 高精度地图系统
高精度地图系统是指在智能化露天矿生产过程中,整个矿山作业区域的三维地形构建以及实时变化的维护过程,并能够为其他相关系统提供需要的地图关键信息[6]。高精度地图核心定义是拥有精确的车辆位置信息和丰富的道路元素数据信息,起到构建类似于人脑对于空间的整体记忆与认知的功能,可以帮助汽车预知路面复杂信息,如坡度、曲率、航向等,更好地回避潜在的风险。高精度地图系统是实现无人驾驶的关键所在,其核心即是地理信息和空间信息。整体作业流程如图1。
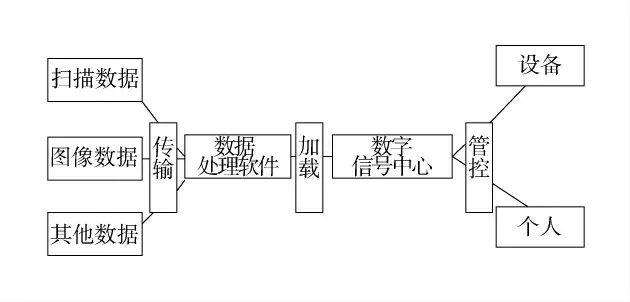
图1 整体作业流程图
2.3 测试场地
通过现场踏勘以及根据无人机测量的相关地形数据分析,对研究地点现场的实际情况进行研究,形成了基地建设的几点技术原则:①拟利用原井东矿遗留的注浆车间场地改造为决策指挥控制系统,考虑到安全方面的因素,采运排测试场地应位于决策指挥控制系统位置水平以下;
②现场未能保留完整的剥采工作面和排土工作面,需要采取工程措施重新构建剥采工作面和排土工作面,考虑到岩石剥挖成本高昂,且不利于端帮的稳定性,场地建设时优先采用剥挖松散物料和采取填方的方式构建作业工作面;
③现场端帮道路保留不完整,且宽度远小于30 m,需要重新构建道路运输系统,考虑到端帮帮坡角较大,端帮路扩宽难以实现,运输系统建设时优先考虑道路较宽位置,必要时设置单行道路;
④主联络道路位于南帮,综合坡度约9%,不符合规范对联络路道路的相关要求,因此需要采取必要措施减小主联络路的综合坡度;
⑤由于基地为深凹尾坑,最大高差达245 m,坑内汇水向坑外排弃较为困难,因此需要在坑底保留汇水坑,以保证雨季期间形成的区域汇水不会影响到基地的正常运行。
该方案充分利用坑底填方形成的1 245 m 水平平台,在该平台实现标准剥采工作面、道路交叉、S弯道等多个场景的构建,同时在1 305 m 水平排土台阶进行挖方处理至1 290 m 水平,形成标准排土作业工作面。在1 290 m 水平排土场以上水平不再设置测试场地,仅通过联络道路联通至场外。
1)剥采工作面。露天矿山的作业起点就是剥采工作面,测试基地建设时需要充分考虑露天矿山不同剥采方式,并搭建符合露天矿实际作业情况的剥采工作面,以满足测试场地对不同剥采方式的模拟和试验。剥采工作面根据自卸卡车的装车方式和工作面组成形式进行设计。装车方式考虑同水平装车和下装车2 种装车方式,设置不同台阶高度的装车作业面;
工作面组成形式设计为相向开采工作面,为充分测试2 个装载作业点距离较近时对卡车作业的影响,工作面采掘带剩余长度尽量取值较小,该值可根据场地建设的实际条件确定。
2)矿山运输。露天矿山采运排3 大主要生产环节中,运输环节是最复杂的,是整个矿山各生产环节中成本最高、设备数量最多、生产管控最困难、最易出现安全事故的关键环节。因此矿山运输系统是智能化露天矿建设的关键核心环节[7]。矿山运输系统的建设需要尽可能还原所有的矿山道路情况,如直线道路、不规则弯曲道路、S 弯道路、交汇道路、交叉道路、连续变坡道路、极限转弯道路、极限爬坡道路、双行变单行道路、路面凹凸道路、两侧附着系数不同道路、路面结构变化道路等,以实现智能化露天矿运输系统的全方位测试。根据研究确定的测试场地建设方案,道路运输系统测试场地建设主要技术特征表见表1。
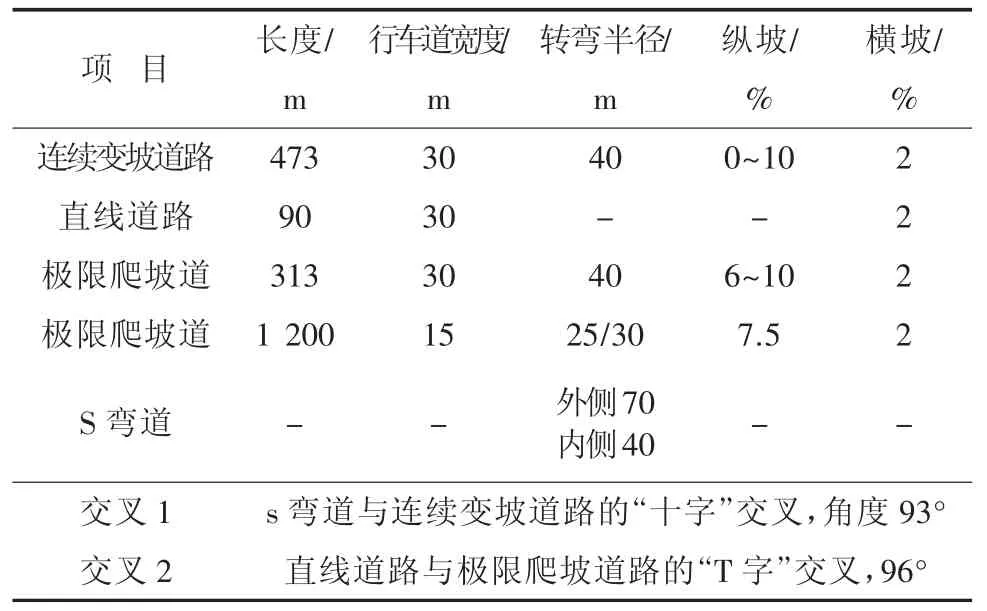
表1 道路运输系统测试场地建设主要技术特征表
3)排土工作面。露天矿山的剥离作业终点是排土场,所有的剥离物都运输到排土场进行排弃。露天矿山采用单斗卡车的开采工艺时,剥离物由卡车运输到排土场进行排弃。因此在构建排土工作面时,应充分考虑矿山自卸卡车的排土作业方式,构建标准卡车排土作业工作面,并考虑辅助排土设备与排土卡车的配合作业问题。
2.4 通信系统
通信系统是指智能化露天矿作业的所有信息交互系统,如地图与决策指挥控制系统、决策指挥控制系统与车辆控制系统、车辆控制系统与车、车与车、车与人等[8]。通信系统的构建采用5G 通信技术,5G技术具有超高速率、超低延时的核心优点,露天矿山智能化系统对通信系统有极高的要求,5G 通信将满足以下要求。
1)大数据量上传要求。智能化露天矿山行驶作业车辆从有人驾驶变为无人驾驶,以前由人的大脑处理和解决的大量复杂数据现在都需要通过网络传输到控制中心统一处理,分析和计算决策。同时系统需要应用V2X 车联网技术,即在车与车之间、车与控制中心之间需要大量的数据传递,5G 技术将很好的满足该需求。
2)传输时延要求。智能化露天矿山中的无人驾驶车辆在遇到异常或紧急情况时会请求控制中心进行接管,因此对中心的快速响应上具有非常高的要求。在这些交互式体验中,具有极低传输时延的5G技术可以很好地解决因时延导致的意外事故,更低的通信延时保证了车辆和人员的安全。
3)快速下载要求。智能化露天矿山无人驾驶车辆行驶路径基于频繁更新路网结构的高精度地图基础上构建,需要支持大量的数据下载和更新,在目前工作繁忙,生产任务紧迫的矿山开采作业中,需要更加流畅的下载体验,才能更大化的提高生产作业效率,更好的保证无人驾驶车辆的安全驾驶行为。
鉴于矿区实际环境情况,且随着测试采矿进度的深入,整体网络建设随着采矿进度进行不定向不定时的移动,不利于架设固定的铁塔进行网络建设,考虑到网络的便捷移动需求,采用5G 通信车的方式进行网络覆盖,通信车对外接口为380 V 动力电源、RJ45 网口、车辆根据测试覆盖情况选择停放于矿区顶部或者底部。网络拓扑结构如图2。
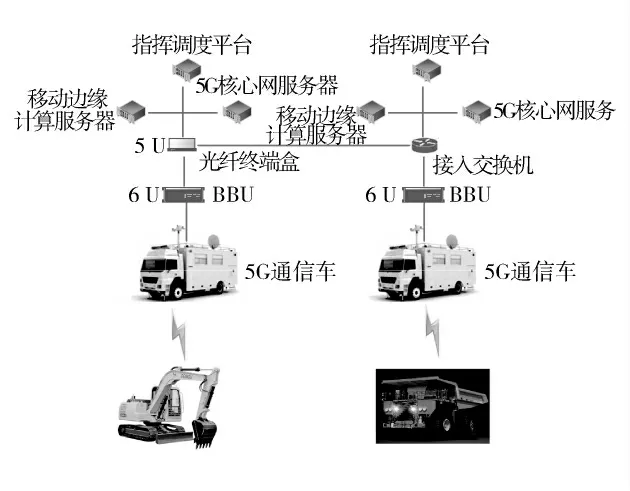
图2 网络拓扑结构图
2.5 露天矿山智能化决策指挥控制系统
决策指挥控制系统是指整个露天矿的最高指挥中心,负责整体管控矿山的所有生产环节。决策指挥控制系统将部署无人矿山管控与测试系统,实现整个测试基地的测试管理与智能调度,包括决策指挥控制系统、应急接管子系统、系统仿真与测试子系统,通过这3 个子系统实现整个智能化矿山的业务管理与示范运营。
1)决策指挥控制系统。决策指挥控制系统是露天矿山机械管理与调度的核心系统,使命是连接采矿作业中的各类机械设备到管控中心大脑,通过不间断的计算、规划、管理,为矿山生产活动打造现代化高效发展引擎。该系统适用于连接和调度智能化矿山各种场景下的工程机械,包括挖卡协同作业场景下的挖掘机、大型矿卡、宽体自卸、排土场等场景中的智能终端设备。决策指挥控制系统根据实际生产需要合理安排作业规划,实现矿山业务综合效益最大化。
2)应急接管子系统。主要包括虚拟驾驶与遥控驾驶2 大模块,其中遥控驾驶通过在平行驾驶中心的驾驶模拟器上部署的遥控驾驶云端程序,完成对自动驾驶车辆的远程应急接管,操作驾驶模拟器的远程遥控驾驶员对车辆控制的优先级大于自动驾驶车辆的自动驾驶算法,驾驶员可以实现对车辆的主动强制接管和被动应急响应接管。虚拟驾驶部分,在中心服务器上部署虚拟环境,并在虚拟环境中映射与真实车辆对应的虚拟车辆。通过控制算法,可以实现车辆在云端的平行学习与运行。
3)系统仿真与测试子系统。矿区工作环境恶劣、道路条件复杂,矿山运输设备体积和重量庞大、传动、转向机构特殊,为无人矿山车辆设备的实际控制造成较大的困难。若直接采用实车进行测试,会有较大的测试风险、也会影响测试的快速进展、并增加测试成本。通过部署虚拟测试将极大提高测试效率、降低测试成本、同时保证测试的安全。该系统需具备准确的矿卡动力学模型、逼真的虚拟现实模型、传感器模型、感知、决策、规划、控制等功能,可仿真内容包括车辆性能测试、运行安全测试、无人驾驶算法测试等,为无人车辆的测试提供多样性的选择。
对如何建设专业化测试基地进行了研究,提出构建三系统一场地的建设思路,并对高精地图系统、通信系统、智能化决策指挥控制系统的重要作用和具体功能进行了剖析,对测试场地的具体建设内容进行了初步构想。建设专业化的露天矿山卡车无人驾驶测试基地有利于推动矿山无人驾驶技术的快速迭代成熟,为矿山智能化建设提供有效的技术途径和经验借鉴。
猜你喜欢 露天矿无人驾驶卡车 我们村的无人驾驶公交作文小学中年级(2022年9期)2022-09-08备战铁矿露天矿与挂帮矿同时开采稳定性研究有色金属(矿山部分)(2021年4期)2021-08-30爆破振动作用下某露天矿高陡边坡稳定性分析有色金属(矿山部分)(2021年4期)2021-08-30露天矿山土石方量的测量及计算电子乐园·上旬刊(2021年8期)2021-05-16卡车赛收官对决汽车观察(2018年12期)2018-12-26专用车企业首次主导 无人驾驶环卫车上路专用汽车(2018年10期)2018-11-02北京第一条无人驾驶地铁试运行!你敢坐吗?科学大众(中学)(2017年3期)2017-07-06忙碌的卡车儿童故事画报(2017年4期)2017-05-26卡车天地商用汽车(2016年11期)2016-12-19无人驾驶飞机海外英语(2013年11期)2014-02-11