半主动叶片式阻尼器的建模与实验研究
郭鑫星,周 瑾,曹晓彦,王运志
(南京航空航天大学机电学院,江苏,南京 210016)
近年来,流体阻尼器凭借其良好的能量耗散性和可靠性被广泛应用于航空、船舶和工业生产等领域[1-3],其理论技术和制造技术得到了飞速的发展,阻尼连续可调的流体阻尼器(CDC)更是得到了专家们的青睐。半主动叶片式阻尼器是CDC 的一种,属于半旋转类流体阻尼器,具有体积小、布置方便和耗能效率高等优点。由于半主动叶片式阻尼器的流场与剪切稀变率较高的液压油会产生交变压力,使得混合在液体中的气体不断分离和溶解,从而导致阻尼器的力学性能具有很大的刚度和非线性。这些因素给阻尼器的力学建模带来了一定的困难。
为了提高CDC 的应用效率,并为设计合理有效的控制策略提供可靠的支持,需要建立合适的力学模型来描述CDC 的力学特性[4-5]。因此,专家们针对CDC 的建模展开了深入的研究。CDC 的模型[6-8]通常分为三类:准静态模型、参数模型和非参数模型,最传统的模型是通过流量公式来计算阻尼器出力的准静态模型[9],这种模型精度较差,只适用于阻尼器的设计阶段,其参数较多,设计的参数值与实际的数值存在较大的误差,并不能很好地模拟阻尼器的出力特性;
也有一些学者,如北京科技大学的王文瑞等[10]基于流体力学公式建立了叶片式阻尼器的力学模型,并通过参数辨识的方法来得到各个参数的值,从而改善了此类模型的精度。常见的参数模型有Kelvin 模型和Maxwell 模型,前者由一个弹簧元件和阻尼元件并联而成,后者则由一个弹簧元件和阻尼元件串联组成,这两种模型均有两个参数,即刚度系数和阻尼系数,模型结构较为单一,能够简单地描述阻尼力的变化趋势,但难以准确地跟踪阻尼力的变化[11]。为此,专家们又对这两种模型进行了改进,提出了广义Kelvin 模型和广义Maxwell 模型,这两种模型在原模型的基础上增加了两个指数参数,以更好地模拟阻尼器出力的非线性,提高了模型精度。以上四种模型是比较经典的参数模型,有不少专家以这些模型为基础,提出在公式中加入一个滞回算子来模拟阻尼器的滞回特性。SPENCER 等[12]采用Bouc-wen 滞后算子来表达磁流变阻尼器的滞后行为,结果表明:Bouc-wen模型具有较高的精度,但该模型较为复杂,其参数识别过程也较为困难;
为寻找一种计算较为简单且精度较高的模型,KWORK 等[13]提出了双曲正切模型,通过双曲正切函数来描述阻尼器的迟滞特性,该模型参数较少,计算方便,参数识别过程相比Bouc-wen 模型较为简单;
KRAUZE 等[14]也通过双曲正切模型建立了磁流变阻尼器的力学模型,并将其与Bouc-wen 模型进行了比较,指出了双曲正切模型的优越性;
CHENG 等[15]还利用考虑激励的双曲正切模型对阻尼器进行了力学建模,进一步提高了双曲正切模型的精度。除此之外,还有学者使用非参数化建模的方式建立CDC的力学模型。SCHURTER 和ROSCHKE[16]应用ANFIS 理论建立了阻尼器的模型;
DU 等[17]采用一个四输入一输出的径向基函数神经网络来模拟磁流变阻尼器的正向和反向的动态特性;
NGUYEN和CHOI[18]通过建立神经模糊系统来追踪智能阻尼器的动态特性。
为精准追踪半主动叶片式阻尼器的力学特性,本文提出一种改进的双曲正切模型,模型包含一个弹簧元件、一个阻尼元件和一个滞回算子。通过改进的自适应遗传算法辨识得到模型的参数,并将该模型与其它现有的两种模型进行仿真对比,以验证该模型的准确性。最后,将模型参数与电机位置值通过多项式进行拟合以验证模型在其他工况下的追踪性能。
1.1 半主动叶片式阻尼器
直升机振动环境较为复杂,主要分为旋翼系统、传动系统和发动机等产生的不平衡振动,以及直升机高速飞行时外表面气动载荷引起的强迫振动;
这类振动中,传递到操纵系统的振动严重影响了飞行员的驾驶安全及身心健康,其中,1 Hz~12 Hz 的低频振动影响尤为显著[19]。为了降低某直升机操纵系统的振动,其一阶共振频率约为3 Hz,本文提出了一种新型半主动叶片式阻尼器,其最大力矩约为20 N·m,图1 为阻尼器的实物图及结构原理图。它的工作原理如图1(c)所示,当阻尼器受到振动激励时,连接臂带动转子叶片旋转,腔室中的油液受到挤压和拉伸后形成高压腔和低压腔,当油液由于压力从高压腔通过阻尼间隙流向低压腔时,由于阻尼间隙的节流作用,产生阻尼力矩。伺服电机的输出轴通过联轴器与调整螺钉相连,调节电机的位置可以对阻尼间隙进行调节,从而控制阻尼力矩。

图1 半主动叶片式阻尼器结构原理图Fig. 1 Structural schematic diagram of semi active blade damper
1.2 动态性能测试
为了研究半主动叶片式阻尼器的力学特性,利用MTS 试验机对阻尼器进行动态性能测试,试验装置如图2 所示。MTS 疲劳试验机是由美国制造,其最大出力为5.5 kN,它配有力传感器和位移传感器,用于力和位移信号的采集,如图2(a)所示。在试验装置中,为了将MTS 试验机的直线运动转化为阻尼器的旋转运动,需要在两者之间安装一个曲柄滑块机构,以方便对阻尼器进行力学特性测试。在测试前,需要将阻尼器的连接臂放置到水平位置,以避免阻尼器超过其最大行程[20],在曲柄滑块机构的连接处适当地添加润滑油以最大程度减小摩擦力对试验的影响。试验装置的工作原理如图2(b)所示,图2(b)中:
α 和 θ分别为AB连杆、OA连接臂与水平线之间的夹角,当OA连接臂处于水平状态时,即θ=0 时,O、B两点间的垂直距离为h,定义此时滑块的位置为其运动原点。当滑块的运动距离为x时,曲柄滑块机构的运动方程如下:

式中:LOA为OA连接臂的长度;
LAB为AB连杆的长度;
A、f分别为激励信号的幅值和频率。
此时,阻尼器的力矩T的计算公式为:

式中,Fexp为力传感器测得的阻尼力。
示功试验采用不同幅值和频率的正弦信号作为激励信号,幅值选用1.0 mm、1.5 mm、2.0 mm、2.5 mm,频率选用1 Hz、2 Hz、3 Hz、4 Hz、6 Hz。试验前,先将调整螺钉调节至节流通道口刚好全开的位置,然后将电机与调整螺钉通过联轴器固接,设定此时电机位置 φ=0°。当电机带动调整螺钉旋转至节流通道口正好完全关闭时,此时电机位置φ=360°。试验时,电机位置φ 取0°、90°、180°、225°、270°、315°、360°。试验结束后,将滑块的位移x通过式(1)转换为半主动叶片式阻尼器的角位移,再通过数值计算得到对应的角速度,将传感器测得的阻尼力Fexp通过式(2)转换为半主动叶片式阻尼器的力矩,以便于试验结果的分析。
1.3 试验结果与分析
当激励信号是幅值为2.0 mm、频率为4 Hz 的正弦信号时,将不同电机位置 φ下的试验数据绘制成角位移-力矩、角速度-力矩图,结果如图3 所示。从图3 中可以看出随着电机位置 φ的增大,半主动叶片式阻尼器产生的最大力矩逐渐增大,这是由于电机位置 φ增大,调整螺钉向底端靠近,导致阻尼间隙变小,阻尼器产生的力矩增大。观察曲线的最高点可以得出,当电机位置 φ=0°时,最大力矩约为1.2 N·m;
当电机位置 φ=360°时,最大力矩约为3.4 N·m,由此可知该阻尼器的可调系数为3 倍左右。图3 中,角位移和力矩包围区域的面积也随着电机位置 φ的增大而增大,表明阻尼器运动一周期消耗的功随着电机位置 φ的增大而增大[21]。除此之外,观察角位移-力矩曲线的斜率可知,半主动叶片式阻尼器存在一定的刚度,并且刚度随着电机位置 φ的增大而增大,这是由于油液受挤压的过程也会产生一个弹性力[22],并且随着阻尼间隙的减小和油压的增大,这个弹性力会逐渐增大。

图3 不同电机位置下半主动叶片式阻尼器的滞回曲线Fig. 3 Hysteretic curves of semi-active blade damper under different motor positions
当激励频率为4 Hz,电机位置 φ=360°时,半主动叶片式阻尼器在不同激励幅值(1.0 mm、1.5 mm、2.0 mm、2.5 mm)下的动态响应曲线如图4 所示,从图4 中可以看出,随着激励幅值的增大,阻尼器产生的最大力矩和运动一周期所消耗的功均在逐渐增大,而阻尼器的刚度变化较小。当激励幅值为2.0 mm,电机位置 φ=360°时,阻尼器在不同激励频率(1 Hz、2 Hz、3 Hz、4 Hz、6 Hz)下的动态响应曲线如图5 所示,从图5 中可以看出,阻尼器所产生的最大力矩和运动一周期所消耗的功随着频率的增大而增大,这是由于随着激励频率的增大,阻尼器的角速度会增大,从而导致阻尼器产生的力矩增大[23-24]。

图4 不同激励幅值下半主动叶片式阻尼器的滞回曲线Fig. 4 Hysteretic curves of semi-active blade damper under different excitation amplitudes

图5 不同激励频率下半主动叶片式阻尼器的滞回曲线Fig. 5 Hysteretic curves of semi-active blade damper under different excitation frequencies
总的来说,半主动叶片式阻尼器的出力特性具有较强的非线性和滞回性,并且存在一定的刚度,这给阻尼器的建模带来了一定的困难,选用合适的力学模型来描述这种特性是目前亟需解决的问题。
2.1 广义Maxwell 模型
Maxwell 模型是经典的参数模型,它由一个线性弹簧元件和一个线性阻尼元件串联而成,如图6(a)所示,该模型结构简单,易于辨识,通常用于描述阻尼器单个频率下的力学特性。在动力学方面,两个元件的运动满足以下方程:式中:K为弹簧元件的刚度系数;
C为阻尼元件的阻尼系数;
F为阻尼器产生的力。

为了解决Maxwell 模型只能在单个频率下保持精度的问题,学者们提出了广义Maxwell 模型,它是一种机械流变模型。结构上,它在Maxwell模型的基础上,将线性弹簧元件和线性阻尼元件分别换为非线性弹簧元件和非线性阻尼元件[25],如图6(b)所示。广义Maxwell 模型的力学公式如下:

图6 流体阻尼器的力学模型Fig. 6 Mechanical models of fluid dampers

式中:
β为弹簧元件位移的指数系数;
α为阻尼元件速度的指数系数。
对于旋转类阻尼器,广义Maxwell 模型的力矩公式可表达为:

式中:T为阻尼器产生的力矩;
θe和 θ˙v分别为弹簧元件的角位移和阻尼元件的角速度,弹簧元件和阻尼元件的运动关系满足式(8)和式(9):

Bouc-wen 模型是一种通过微分方程来描述迟滞、非线性现象的参数模型,它的数学表达式简洁直观,参数较少,适用于描述工程问题中出现的迟滞、非线性现象[26-27]。在磁流变领域,这种模型已被广泛地应用于磁流变阻尼器的力学建模,并且大量文献已证明该模型良好的精度。考虑到半主动叶片式阻尼器中存在一定的刚度,Boucwen 模型中保留一个弹簧元件,其力矩公式如下:

2.2 Bouc-wen 模型
式中:T为阻尼器产生的力矩;
θ为阻尼器的角位移;
θ˙ 为阻尼器的角速度;
K为阻尼器的刚度系数;
C为阻尼器的阻尼系数;
z为滞回算子;
α、β 、 γ、A、n均为滞回曲线的形状控制系数,为计算简便,n通常情况下取2[28];
T0通常用于描述阻尼器存在的偏置力矩。因此,Bouc-wen 模型总共有7 个 参 数(K、C、 α 、 β 、 γ、A、T0)需 要 辨识,由于模型中含有复杂的微分方程,这使得辨识过程变得相对困难,计算量也相对较大,不利于振动的半主动控制。
2.3 改进的双曲正切模型
为了寻找一个计算量较小,易于辨识的模型,有学者提出了一种用双曲正切函数来描述滞回特性的双曲正切模型,它和Bouc-wen 模型相似,用一个弹簧元件和一个阻尼元件来描述半主动叶片式阻尼器的刚度和阻尼,用一个滞回单元来描述阻尼器的滞回特性[23],该模型结构如图7 所示。

图7 双曲正切模型Fig. 7 Hyperbolic tangent model
根据旋转类阻尼器的运动特性,双曲正切模型的力矩公式如下:

标准的双曲正切模型中,弹簧元件和阻尼元件均为线性元件,在追踪半主动叶片式阻尼器强非线性的力学特性时仍然存在不同频率下不能保持精度的缺陷,为弥补这一不足,进一步改善模型的追踪性能,本文将原模型中线性的弹簧元件和阻尼元件换为非线性的弹簧元件和阻尼元件,在两个元件中引入分数阶,以更好地追踪半主动叶片式阻尼器的力学特性,模型结构如图8 所示。

图8 改进的双曲正切模型Fig. 8 Improved hyperbolic tangent model
改进后的双曲正切模型力矩公式如下:

式中,a1和a2分别为角位移的指数系数和角速度的指数系数,其余参数与双曲正切模型参数意义一致。需要辨识的参数共有8 个,分别为K、C、a1、a2、 α 、 β 、 γ和T。虽然模型中增加了两个参数,但模型总体计算量增加不大,依旧避免了复杂的微分方程。
确定半主动叶片式阻尼器的力学模型后,需要对模型进行参数辨识,比较常用的寻优算法有最小二乘优化算法、粒子群优化算法、差分进化算法和遗传算法等。本文使用改进的自适应遗传算法对上文几种模型进行参数辨识,编码方式采用实数编码。改进的自适应遗传算法的主要步骤为:选用合适的目标函数和设定各个参数的上下限,根据参数的上下限随机生成一个初始种群;
计算种群中每个个体的适应度值,判断适应度值是否达到要求,若达到要求,则停止计算,否则对种群进行遗传操作(选择、交叉、变异)生成新的种群;
然后重新计算新种群的适应度值,重复以上步骤,直至达到要求的适应度值或最大迭代次数[29]。
为寻找能准确追踪半主动叶片式阻尼器力学特性的模型参数,本文选用试验值与仿真值之间的误差的均方值为目标函数,具体计算公式如下:

在选用合适的目标函数和适应度函数之后,需确定遗传操作中的交叉概率和变异概率,一般遗传算法的交叉概率和变异概率为固定值,所以在交叉变异的过程中会出现适应度较好的个体仍被淘汰的现象,针对这一问题,自适应遗传算法根据个体的适应度值来计算交叉概率和变异概率[30],具体计算方法如式(18)和式(19)所示。

式中:fmax为种群中适应度值的最大值;
fmin为种群中适应度值的最小值;
f′为两个交叉个体中适应度值的最大值;
favg为种群中适应度值的平均值;
pc1和pc2为交叉概率系数;
pm1和pm2为变异概率系数。一般来说,pc1和pm1取一个较小值,pc2和pm2取一个较大值,这样可以使得适应度值小的个体有更大概率进行交叉和变异,适应度值大的个体更有利于保留下来,从而提高遗传算法的收敛速度。
为进一步提高自适应遗传算法在前期的搜索性能和后期的收敛速度,改进的自适应遗传算法在传统的自适应遗传算法之上,还采用一种新型自适应变异因子,它的主要功能是让个体变异的范围随着迭代次数的增大而减小,其计算公式如下:

式中:k为迭代次数;
st(k)为第k次迭代时的变异因子的值;
gmax为最大迭代次数;
σ为范围控制系数,用于确定个体变异的范围,本文取0.557。改进的自适应遗传算法在迭代初期,k值较小,变异因子的值较大,种群在这个阶段被选中的个体会产生较大的变异,从而提高算法在前期的全局搜索能力;
在迭代后期,k值较大,变异因子的值较小,这个阶段被选中的个体会产生较小的变异,从而加强算法在后期寻优的精确度和收敛速度。
4.1 模型辨识结果及验证
本文基于正弦信号(幅值为2 mm,频率为4 Hz)激励时5 种不同电机位置(0°、180°、270°、315°和360°)下的试验数据,用改进的自适应遗传算法对第3 节中的三种力学模型进行参数辨识。
广义Maxwell 模型参数辨识的结果如表1 所示,从表1 中可以看出参数K和C均随着电机位置φ的增大而增大,这与第2 节中的结论相符,而参数 β 和 α则在一个小范围内波动。广义Maxwell 模型仿真曲线与试验曲线的对比如图9 所示,从图9中可以看出广义Maxwell 模型能较好地追踪阻尼器的变化趋势,但与实际力矩之间还有较大误差。

表1 广义Maxwell 模型参数辨识结果Table 1 Parameter identification results of generalized Maxwell model
Bouc-wen 模型参数辨识的结果如表2 所示,从表2 中可以得知参数K和C随着电机位置的增大而增大, γ随着电机位置 φ的增大先减小后增大, α、β、A没 有明显的规律性,T0则是一个较小的值,说明半主动叶片式阻尼器的偏置力较小。Bouc-wen模型仿真曲线与试验曲线的对比如图10 所示,从图10 中可以看出,Bouc-wen 模型无论是在半主动叶片式阻尼器角位移-力矩关系上,还是角速度-力矩关系上都能较好地模拟阻尼器的出力,模型精度较高,但Bouc-wen 模型计算量较大,识别过程中容易出现奇点,在搭建半主动控制系统的时候会加大系统的运算量,导致系统产生一定量的时滞,这也限制该模型的应用[31]。

表2 Bouc-wen 模型参数辨识结果Table 2 Parameter identification results of Bouc-wen model

图10 Bouc-wen 模型仿真值与试验值对比曲线Fig. 10 Comparison curve of simulation value and experimental value of Bouc-wen model
改进的双曲正切模型参数辨识的结果如表3所示,从表3 中可以得知,参数K和C的规律与前两种模型表现一致,均是随着电机位置 φ的增大而增大;
a1一直是靠近1 的数值,前后波动不大这表明在改进的双曲正切模型中弹簧元件是一个近似线性的弹簧;
a2、 α 、 β 和 γ均在一个小区间内波动,T0与Bouc-wen 模型中的值相似,均是一个较小的数值。改进的双曲正切模型仿真曲线与试验曲线的对比如图11 所示,从图11 中可知,改进的双曲正切模型精度较高,能够精准地追踪阻尼器力矩随角位移和角速度的变化。虽然参数数量比Bouc-wen 模型多,但模型中不含复杂微分方程,计算简单,适用于后续半主动控制的应用[32]。

图11 改进的双曲正切模型仿真值与试验值对比曲线Fig. 11 Comparison curve between simulation value and experimental value of improved hyperbolic tangent model

表3 改进的双曲正切模型参数辨识结果Table 3 Parameter identification results of improved hyperbolic tangent model
4.2 误差分析
为了更清晰地显示几种模型的误差,选用第4节式(16)来对模型进行误差分析,通过计算得到的结果如表4 所示。从表4 中可以看出改进的双曲正切模型的精度是三种模型中最高的,Bouc-wen模型其次,广义Maxwell 模型最差,表明改进的双曲正切模型适用于半主动控制。

表4 三种模型的误差Table 4 Errors of three models
为了让改进的双曲正切模型可用于半主动控制,需要将各个模型参数与电机位置之间的关系用数学表达式进行描述。观察第5 节中辨识得到的模型参数,其中参数K和C随着电机位置 φ的增大而增大,参数 α 、 β 和 γ 随 着电机位置 φ的增大呈现波动的趋势,以上参数与电机位置之间的关系可用多项式进行整合,整合结果如图12 所示。而参数a1是一个靠近1 的数值,为简化计算,本文认为对于半主动叶片式阻尼器,模型中的弹簧元件为线性弹簧,即取1,a2没有明显的规律,用平均值法取0.672。拟合后的参数表达式如下:
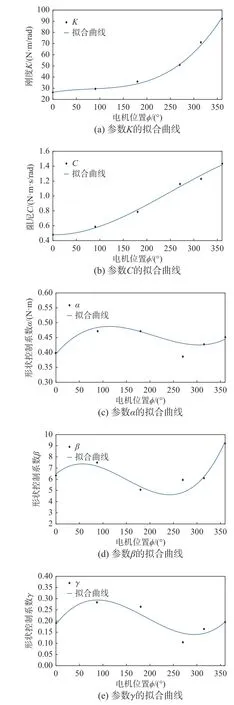
图12 模型参数拟合曲线Fig. 12 Fitting curves of model parameters

为了验证参数拟合后的模型在其他工况下的准确性,选取其它五种工况来验证模型的适应性,得到的试验仿真对比曲线如图13 所示。从图13 中可以看出,在其他工况下参数拟合后的模型精度相比参数辨识的几种工况,精度虽然略微下降,但仍然能够保持较好的跟踪性能,说明改进的双曲正切模型可用于半主动控制中。
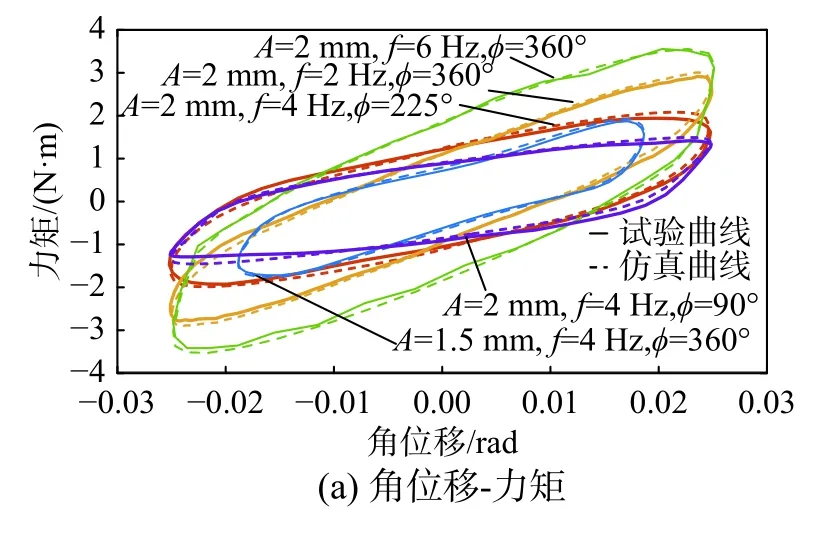

图13 其它五种工况下改进的双曲正切模型仿真值与试验值对比曲线Fig. 13 Comparison curve of simulation value and test value of Improved hyperbolic tangent model under the other three working conditions
本文提出了一种新型的半主动叶片式阻尼器:
(1)通过MTS 测试了其力学特性。
(2)为精确跟踪半主动叶片式阻尼器的力学特性,提出一种改进的双曲正切模型。
(3)针对基本遗传算法容易陷入局部极值的缺点,采用改进的自适应遗传算法对模型参数进行辨识,有效地提高了算法的寻优性能,并将辨识后的参数与电机位置之间的关系用多项式进行拟合。
通过与试验数据的对比分析,表明改进的双曲正切模型具有较高的精度,可应用于半主动控制中。
猜你喜欢 阻尼器阻尼力矩 阻尼减振技术在航空航天领域中的研究进展材料研究与应用(2022年4期)2022-09-01新型舌板黏滞阻尼器力学性能试验研究世界地震工程(2022年2期)2022-05-11砌体墙上安装摩擦型阻尼器施工技术探讨建材发展导向(2022年5期)2022-04-18基于地铁车辆装配带力矩螺栓紧固的工艺优化分析新视线·建筑与电力(2021年2期)2021-09-10高锁螺母拧断力矩及拧断槽尺寸计算方法研究直升机技术(2020年2期)2020-06-16高效耗能阻尼器性能试验及理论研究振动工程学报(2019年5期)2019-11-27发动机阻力矩计算和起动机介绍山东青年(2016年12期)2017-03-02控制隔震层发生过大位移的连接摩擦阻尼器的参数优化设计振动工程学报(2016年2期)2016-07-20ABAQUS/Explicit分析中的阻尼建筑工程技术与设计(2015年29期)2015-10-21不倒翁的物理原理中学生数理化·八年级物理人教版(2014年2期)2014-04-02