基于ESO的OMR轨迹跟踪预测控制
税 懿,杨永峰,向国菲,佃松宜*
(1. 四川大学电气工程学院,四川 成都 610065;
2. 国网浙江电力有限公司衢州供电公司,浙江 衢州324000)
随着现代控制技术和计算机技术的发展,移动机器人开始在越来越多的领域发挥重要作用,如物流、化工、商场购物等领域。与车式移动机器人、差速移动机器人相比,四个麦克纳姆轮全向移动机器人(four mecanum omnidirectional mobile robot,FMOMR)具有较高的移动性,在有限空间中移动方便,因此在足球机器人、仓库搬运机器人、移动机械手等领域得到了广泛应用[1,2]。然而,在实际应用中,FMOMR必然会收到自身轮子磨损,非线性摩擦和外部干扰的影响,导致FMOMR无法实现精确跟踪。因此,基于FMOMR设计的轨迹跟踪控制器,必须要满足较强的抗干扰能力。
近几年,许多研究人员针对存在未知干扰的全向移动机器人设计滑模控制器,其研究结果表明滑模控制器能有效抑制外部扰动[3]。为了减少滑模控制中到达滑动面时间、降低抖振,将模糊控制与滑模控制相结合,使设计的轨迹跟踪控制器不依赖系统的模型且对干扰具有完全鲁棒性[4],但是模糊滑模控制需要调试大量参数。另一方面,可以利用模糊能够处理不确信息的能力设计模糊神经网络控制实现轨迹跟踪[5],但是模糊神经网络控制器需要大量学习,计算量大,不便于具体实现。
文献[6]、[7]将模型预测控制与自适应控制相结合,设计出广义预测控制(generalized predictive control,GPC)算法,具有预测模型、滚动优化和反馈校正等特点,对开环不稳定、非最小相位以及大时滞系统有很好控制效果[6,7]。但值得注意的是广义预测控制只能有效抑制确定性的干扰,当系统存在模型严重失配或未知干扰,如参数扰动、未建模动态等,控制精度会显著降低。
为了解决这个问题,本文针对FMOMR提出基于扩张状态观测器(extended state observer,ESO)的广义预测控制算法,相较于文献[6]、[7],所提出的方法能有效抑制未知干扰和参数摄动。
本文的贡献主要有:1)设计基于ESO的广义预测控制器,分别实现FMOMR在混合线性干扰和非线性干扰等未知干扰下的轨迹跟踪控制。2)设计的轨迹跟踪控制器与基于Kalman的广义预测控制算法[8]比较,收敛速度更快,跟踪效果更好。
利用TS模糊神经网络辨识得到一组TS模糊模型,然后通过加权求和的方式得到受控差分整合滑动平均自回归(controlled autoregressive integrated moving average,CARIMA)模型[9]
A(z-1)y(k)=B(z-1)u(k-1)
(1)
其中y(k)、u(k-1)分别表示被控对象输出输入量,ξ(k)是均值为白噪声,A(z-1)和B(z-1)是后移算子z-1的多项式,它们分别可以表示如下:
(2)
针对得到的多输入多输出系统的CARIMA模型(1),可以将其目标函数表示为
(3)
其中N为预测时域,Nu为控制时域,λ为控制增量加权系数,w(k+j)为参考轨迹。然后从当前时刻寻找Nu步控制变量Δu(k+j-1),使系统在未来N步的预测输出与给定参考轨迹的误差最小。
为了使系统的输出平滑的到达设定值,以减少过量的控制作用而引起振荡,使当前时刻的输出可以平稳收敛,通常选用如下一阶滞后模型
w(k+j)=δy(k)+(1-δ)yr
(4)
其中0≤δ<1为柔化因子。
引入Diophantine矩阵的多项式方程得
I=Ej(z-1)A(z-1)Δ(z-1)+z-jFj(z-1)
(5)
Ej(z-1)B(z-1)=Gj(z-1)+z-jHj(z-1)
(6)
其中j=1,…,N,
式(1)两边同时乘以Ej(z-1),求解上式可得

(7)
将其写成向量形式

(8)
其中

uT=[Δu(k)T,…,Δu(k+Nu-1)T]


然后,利用内点法对目标函数(3)求最优解。
首先假定函数满足
limτ→0+h(τ)=+∞
h(τ)>0,∀τ>0
h(τ1)≥h(τ2),∀τ1≤τ2
其中τi(u)≥0,i=1,…,m,τi(u)是目标函数J(u)的不等式约束函数。
将h(τ)作为惩罚项,取惩罚项函数为h(τ1)=ln[τi(u)],构造内点罚函数如下

(9)
则求解目标函数(3)的问题变为求解如下目标函数

(10)

假设J(u),ln[τi(u)]和Pζk(u)为凸函数,则问题(10)的牛顿步长如下
dk=-[∇2Pζk(uk)]-1∇Pζk(uk)
(11)
如果uk+dk在可行域内,那么令uk+1=uk+dk,否则存在αk>0使得uk+αkdk正好处在可行域边界上,这时令uk+1=uk+0.9αkdk,这样uk+1总是内点。
具体算法步骤如下:
1) 给定u1满足τi(u)≥0,i=1,…,m;



使用内点法求解后可以得到

(12)
其中f=HΔu(k-1)+Fy,令∂P/∂u=0,求得控制量u
u=(GTG+Iλ)-1(D+wGT-fGT)
(13)

取(GTG+Iλ)-1的第一行,并且将其第一行表示为PT=[P1,…,PN]。根据滚动优化和反馈校正原理,广义预测控制律可以写成
Δu(k)=PT(D+wGT-fGT)
(14)
u(k+1)=u(k)+Δu(k)
(15)

图1 控制系统框图
提高FMOMR轨迹跟踪控制抗扰性能的关键是增强广义预测控制的鲁棒性,由此采用扩张状态观测器估计扰动[10]。基本思路是将系统中的未建模动态和外部扰动统一看作一个状态量g(k),结合原有的状态变量,将系统(1)扩张成新的1阶控制系统。对这个扩张的系统构造2阶扩张状态观测器(20),实时估计状态量g(k),补偿系统模型,从而提高系统的抗干扰性能。具体的设计过程如下:
考虑FMOMR参数摄动和外部扰动,FMOMR的CARIMA模型可以表示为
(A(z-1)+ΔA(z-1))y(k)
=(B(z-1)+ΔB(z-1))u(k-1)+xi(k)
(16)
式中,ΔA和ΔB表示FMOMR的参数摄动量,xi是外部扰动。令
g(k)=-ΔA(z-1)y(k)+ΔB(z-1)u(k-1)+xi(k)
(17)
其中g(k)代表总扰动向量,继而式(16)可以表示为
A(z-1)y(k)=B(z-1)u(k-1)+g(k)
(18)
令x2=g(k)为扩张的状态量,g′(k)为扰动向量g(k)的变化率,则式(18)可以扩张为

(19)
由此构建扩张状态观测器如下

(20)
其中β01、β02和h为ESO的设计参数,z1为位姿坐标y的估计值,z2为扰动向量g(k)的估计值。选择适合的ESO参数,可使z2≈g(k)。


(21)

将由扩张状态观测器估计的扰动向量作为前馈补偿控制,因此得到控制量为

(22)
显而易见,新控制器与常规广义预测控制器[6,7]式(15)相比,新增了扰动补偿项z2/b0。该扰动补偿项只需要原对象实时的输入-输出信息就可以通过构建扩张状态观测器得到,从而有效抑制参数摄动和外部未知扰动对系统的影响。
新控制器增强了传统广义预测控制器[6,7]的抗干扰性能,弥补了传统广义预测控制器缺乏抑制未知干扰能力的不足,又保留了GPC具有的预测模型、滚动优化和反馈校正等优点,具体控制系统结构框图如图1所示。
广义预测控制和扩张状态观测器的具体参数设计如表1所示:
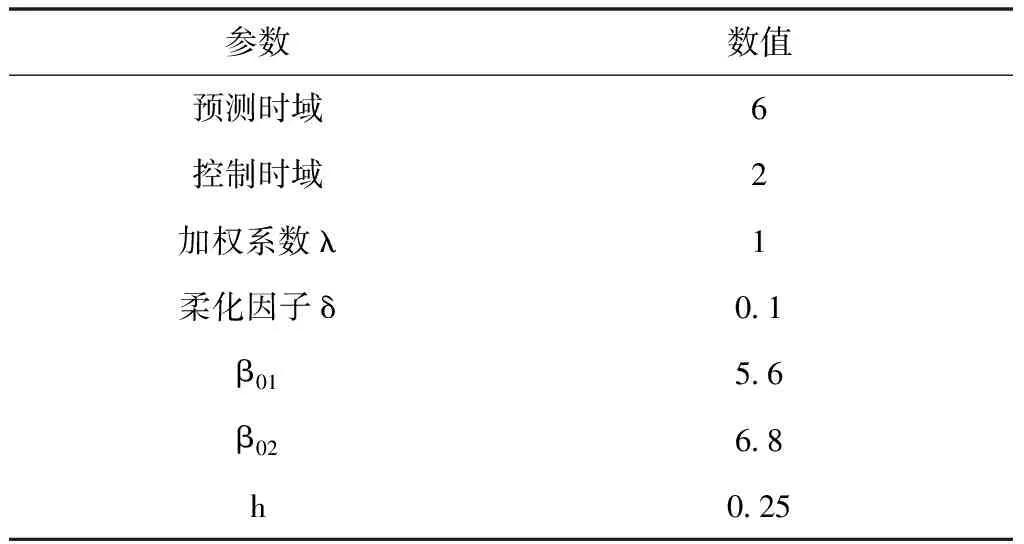
表1 广义预测控制和扩张观测器具体参数
为了更好的验证本文设计的GPC-ESO轨迹跟踪控制器的跟踪性能和抗扰性能,将其与GPC-Kalman[8]相比较,FMOMR参考轨迹是8字形轨迹。
图2,图3和图4是GPC-ESO和GPC-Kalman在混合干扰下的轨迹跟踪效果,混合干扰如下式

(23)

图2 混合干扰情况下的跟踪效果
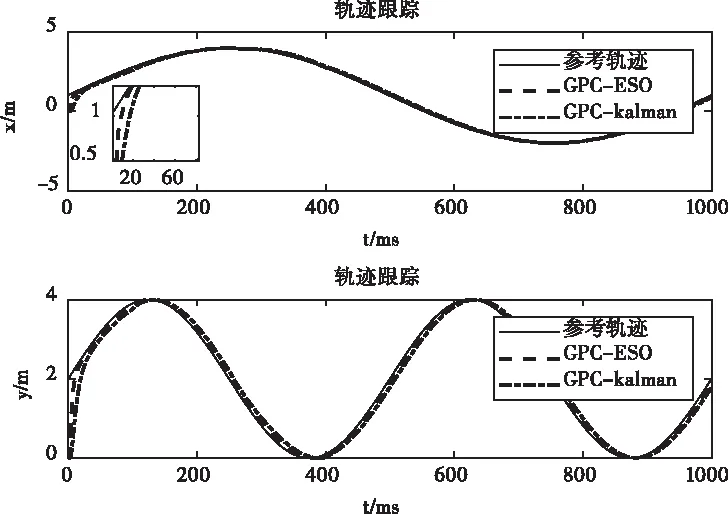
图3 混合干扰情况下的跟踪效果

图4 混合干扰情况下的误差
可以看到,在混合干扰的情况下,GPC-ESO较GPC-Kalman都有比较好的跟踪效果,在干扰类型转换的节点,GPC-ESO较GPC-Kalman抑制干扰的效果更好,收敛速度更快。
图5,图6和图7是GPC-ESO和GPC-Kalman在非线性干扰xi=5*sin(t/150)*cos(t/300)情况下的轨迹跟踪控制效果。

图5 非线性干扰情况下的跟踪效果
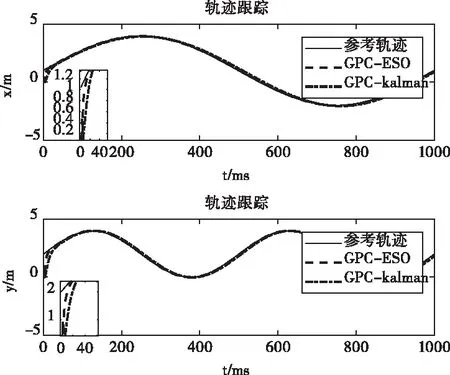
图6 非线性干扰情况下的跟踪效果

图7 非线性干扰情况下的误差
可以看到在非线性干扰情况下,GPC-ESO较GPC-Kalman算法的抑制干扰的效果更好,且收敛速度更快。
表2显示了在不同干扰情况下两种控制方法的轨迹跟踪结果。可以看到无论是RMSE,SMPAE,还是NRMSE的误差评价指标下,本文提出的GPC-ESO的轨迹跟踪误差都小于GPC-Kalman的轨迹跟踪误差,所以GPC-ESO的抗干扰性能更好。

表2 GPC-ESO和GPC-Kalman分别在混合干扰和非线性干情况下跟踪8字形曲线的RMSE、SMAPE、NRMSE
本文针对FMOMR在参数摄动和外部未知干扰情况下的轨迹跟踪问题,提出基于扩张状态观测器的广义预测控制策略,通过仿真研究分析,主要有以下结论:
1)设计的扩张状态观测器,能实时补偿各种未知干扰,包括混合线性干扰和非线性干扰。
2)设计的GPC-ESO控制律,能有效抑制参数摄动和外部干扰,当轨迹跟踪过程中扰动发生突变时,该控制律能使系统快速收敛,实现轨迹跟踪。
3)在对比仿真研究中,通过误差性能指标定量分析2种不同控制策略的跟踪控制性能,可以得出,所提出的控制策略具有更好的抗干扰能力。
猜你喜欢 扰动广义轨迹 一类五次哈密顿系统在四次扰动下的极限环分支(英文)上海师范大学学报·自然科学版(2022年3期)2022-07-11基于扰动观察法的光通信接收端优化策略汽车实用技术(2022年5期)2022-04-02浅谈求轨迹方程中的增解与漏解福建中学数学(2021年1期)2021-02-28The Last Lumberjacks汉语世界(The World of Chinese)(2021年1期)2021-02-22无从知晓小资CHIC!ELEGANCE(2021年44期)2021-01-11一类特别的广义积分数学学习与研究(2018年12期)2018-08-17任意半环上正则元的广义逆上海师范大学学报·自然科学版(2018年3期)2018-05-14捕捉物体运动轨迹课堂内外(小学版)(2017年3期)2017-04-15天津大神堂海洋特别保护区生境修复初步评价河北渔业(2014年11期)2014-11-17带电的标量场扰动下ReissnerNordstrm Antide Sitter黑洞的不稳定性湖南师范大学学报·自然科学版(2014年5期)2014-11-14上一篇:有关火星科幻的那些事
下一篇:化险为夷