车联网背景下探究交叉口感应信号控制优化设计
李靖丰 胡小敏


摘要:在车联网背景下,能够获取车辆的相关信息,通过对这些数据的利用,能够更好的实现交通便捷、不拥堵的目的。于是文章对交叉口感应信号控制进行优化设计,通过对车联网历史数据和实时数据进行分析利用,搭建车联网环境平台,最后对其进行仿真实验,与常规感应信号控制相比,优化设计之后的方法具有更好的实用性。
关键词:车联网;交叉口;感应信号控制;优化
中图分类号:U495
文献标识码:A
文章编号:1001-5922(2020)12-0167-05
车联网属于一种信息交互网络,其中包含车辆的位置、行驶路线和速度等信息,所以在车联网背景下,能够获得车辆的实时信息,于是在设计交叉口感应信号时能够根据车联网背景下获取的信息数据进行控制[1-2]。对于这方面的研究,国内外已经取得了一定成果,然而众多研究中也会存在不足之处,比如没有对历史车联网数据进行利用,而且预测交通流所使用的模型比较复杂,从而导致计算速度比较慢,另外,交叉口感应信号控制相序优化机制的研究非常少[3-5]。所以文章主要将对车联网背景下交叉口感应信号控制进行优化设计,使用历史车联网数据,提高车辆通行效率,使的我国交通更加的便捷。
1 车联网环境搭建
文章在探究交叉口感应信号控制优化设计时,使用了车联网的背景,于是利用车联网获取相关车辆信息,需要搭建一个车联网环境。文章搭建了如图1所示的车联网环境仿真平台,其中TransModeler是一种以MITSIM交通流模型为基础的商品化微观交通仿真软件,该软件结合外部算法能够获取车辆相关信息[6-7]。在搭建过程中使用SAE J2735专用短程通信消息集字典标准,并且使用其中BSM,包含各种车辆的相关信息[8]。该环境的搭建有利于感性信号控制进行优化,而且是一个可靠的仿真平台。
2 交叉口感应信号控制优化设计
2.1 前提假设
1)在使用仿真方式对信号控制进行优化时,需要要求车辆都安装车联网车载终端,且能够发送BSM消息。
2)在交叉口中心出设置路边设备,然后能够获取BSM消息,并且将这些数据进行存储。
3)交叉口处不考虑其他行人或者自行车的混合交通流,值只考虑所有车辆,且这些车辆在行驶过程中均按照交通规则通行。
4)使用如图2所示的典型十字交叉口为描述对象。从图中可以看出车辆有N状态和D状态,其中D状态表示的是车辆正在行驶,N表示的是车辆处于等待状态,也就是其车辆的速度要小于一定值,车辆下面的数字表示的在某个一个范围和时刻下所有该状态车辆的编号。
2.2信号控制流程
按照感应信号控制思路,需要对相位的运行状态进行分类,可以分为启动瞬间、过渡状态、绿延状态和初始绿状态,如图3所示,图3表示的是信号控制流程,文章将主要研究图3中颜色不一样的3个模块。
2.3相位启动处理
交叉口的交通状态如图4所示,西往东直行相位启动瞬间,车联网数据进行处理的过程如下:
2)标定示踪车辆,图4中的Trace Vehicle就是示踪车辆,即处于排队车辆的最后一辆车,相位初始最大排队长度就是示踪车辆距离停车线的距离。示踪车辆也可以没有,那么此时的最大初始排队长度也为0。
2.4 相位切换判断
图5即为判断相位切换时刻交叉口的交通状态,然后通过车联网获取的信息数据进行处理,得到两个参数,首先是得到控制范围内等待放行的车辆数量,然后就是得到相位最新越过停车线的车辆,即图5中Crossing Vehicle车辆的速度。
本相位在满足一定条件下需要进切换,一共包含以下3个条件,如果该3个条件一个都不满足,则增加一个单位绿灯延时,然后再判断切换相位。
1) Crossing Vehicle车辆的速度和交叉口限速比例大于某一个限定值,此时车流能够非常快速通过停车线。
2)等待放行车辆小于某一个特定值,则控制范围内的车辆基本清空。
3)绿灯时长达到了最大绿灯时间。
2.5相位结束处理
本相位结束之后,需要对车联网的历史数据和瞬时数据进行处理,其处理内容如下。
1)计算本相位的消散速度。只有当存在示踪车辆时,消散速度才不会为0,且其计算公式如下:
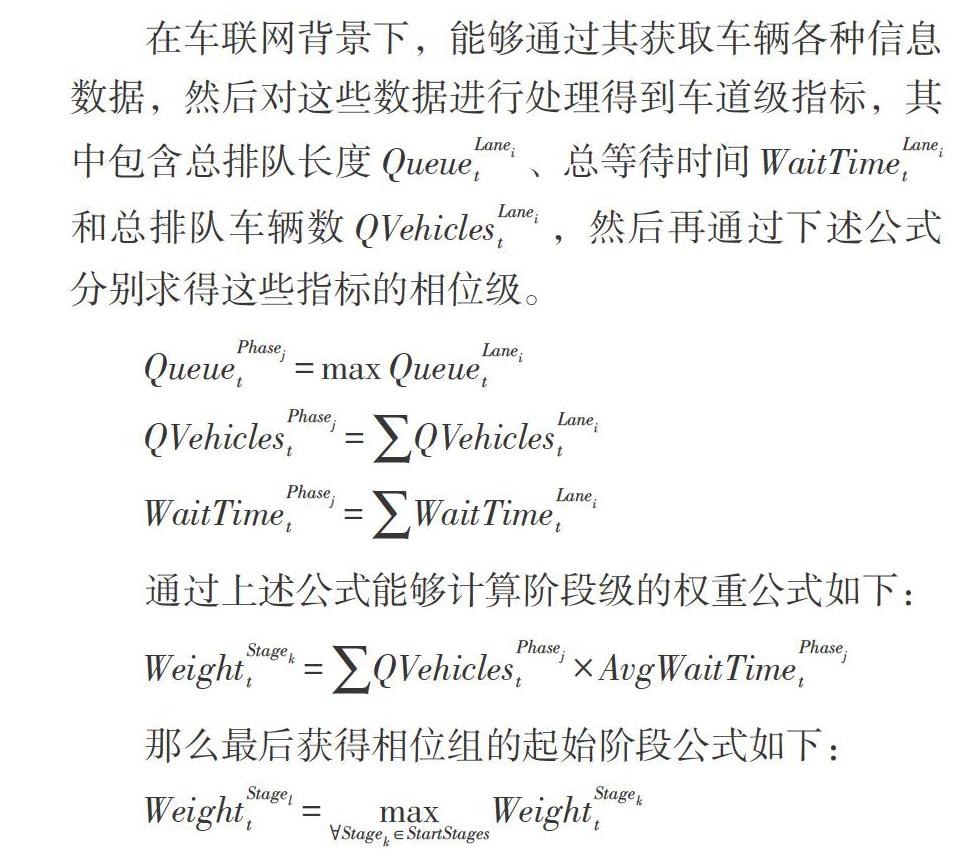
3)确定下一个相位。本文使用的交叉口双环相位结构如图6所示,该结构一个相位组内包含4种可能的起始阶段,如表1所示,然后图7表示的是每个起始阶段对应基本双环结构的3种运行模式,那么一个相位包含12种运行模式,这种方式具有更好的灵活性和安全性。
3 实验和分析
3.1 实验过程
为了验证上述车联网背景下交叉口感应信号控制优化设计的可靠性,文章对其进行了实验研究。选择某市一个路口为例进行仿真实验,该路口的示意图如图8所示,定时控制配时现状如表2所示,平峰状态时转弯流量如表3所示。
为了验证本文的优化设计的有效性,将其与普通的感应信号控制方法进行比较。图9即为相序,然后将单位绿灯延时设置为3s,最短绿灯时间为14s,定时控制绿灯时间和最大绿灯时间相同。本文进行的优化设计方法中使用如表1所示的双环结构,然后2种方法的参数相同,最后使用TSM进行定时控制完成仿真实验。
3.2 实验结果
通过上述仿真实验获得如表4所示的实验结果,从中可以看出,与普通的感应信号控制相比,文章的优化设计方法具有更好的使用效果。所以本文在车联网背景下,通过利用其优势,然后对交叉口感应信号控制进行优化设计,能够具有显著性的控制作用。
4 结语
综上所述,在车联网背景下,能够获取车辆的相关信息数据,然后对交叉口感性信号控制进行优化设计之后,通过对这些数据进行利用,相比于常规感应信号控制,本文所设计的方法具有更好的优势,比如平均延误下降、停车时间变短、排队车辆变少等,所以该方法更有利于我国交通的不断进步。
参考文献
[1]王建强,吴辰文,李晓军.车联网架构与关键技术研究[J].微计算机信息,2011(04):156-158.
[2]周斌.基于车联网仿真平台的城市交通信号控制[D].浙江:浙江大学,2016.
[3]姚佼,楊晓光,车路协同环境下城市交通控制研究[J].上海理工大学学报,2013,035(04):397-403.
[4]张存保,冉斌,梅朝辉,等,车路协同下道路交叉口信号控制优化方法[J].交通运输系统工程与信息,2013(03):40-45.
[5]张存保,陈超,严新平.车路协同下信号控制交叉口两难区问题改善方法[J].中国安全科学学报,2012(06):86-91.
[6]臧志刚,陆锋,李海峰,等.7种微观交通仿真系统的性能评价与比较研究[J].交通与计算机,2007(01):66-70.
[7]臧志刚,陆锋,李海峰,等,微观交通仿真平台的地理信息系统支持能力分析[J].测绘科学,2008,33(02):38-41.
[8]许宏科,陈云.基于专用短程通信的个性化交通信息服务系统[J].长安大学学报:自然科学版,2004(02):70-72.
猜你喜欢 交叉口车联网优化 优化英语课堂教学策略的探索福建基础教育研究(2019年3期)2019-05-28促进学生认识发展 优化初中化学复习福建基础教育研究(2019年11期)2019-05-28基于arduino的紧急车辆优先通行交叉口信号控制设计农机使用与维修(2018年2期)2018-02-26基于IPv6的网联汽车和城市智能交通系统建设途径与方法研究物流科技(2017年9期)2017-10-31浅谈车联网技术科技视界(2017年1期)2017-04-20基于电路暂态理论的城市道路交叉口交通流模型山东工业技术(2017年4期)2017-03-28车联网技术实验教学改革与探索教育教学论坛(2016年49期)2017-02-27城市道路多交叉口协调控制方案设计与仿真研究科技创新与应用(2016年36期)2017-02-21浅谈城市道路交通世界家苑(2017年12期)2017-01-10CAE软件操作小百科(30)计算机辅助工程(2016年1期)2016-03-15